 )
)����
��������Ϸ����й�ָ�������ѧ�ᡱ�ɹ�ע���ǣ�
������������������һλ��ʱ���Ĵ�ʦ��һλ�ɾ��������˵����ߣ�һ�����ѳ�Խ����̱����������ϵͳ���ܿ��Ժ��ܹ��ԣ�Ϊ�������۵ij��ֵ춨�˼�ʵ�Ļ�������λ��������������ѧ������Ŀ������˲����߸���ͨ�ţ��������Ƶ�����Ƶȶ����������ִ��Ƽ��ķ�չ�����Ǿ�ġ�2016��7��2�գ���λ���������ˣ�����������ǻع�һ����λ���������һ�����ٴ��߽�������һ���������ѧ���磡
����
����³����·������
����2016��7��2���賿��һ����ʦ�������������ǣ�����86�ꡣ
������ʦ��һ��
����³����·��������Rudolf Kalman����1930��5��19�ճ�������������������˹��������һλ��������ʦ���������游�ĽŲ����ƾ�����������ʡ����ѧԺ��õ�������ѧʿ��˶ʿѧλ��֮�������뿪����ʡ����ѧԺ��ǰ�����ױ��Ǵ�ѧ���������о���������˸��ױ��Ǵ�ѧ��ʿѧλ����Ҳ�������꣩
����
��������ʱ��Ŀ�����
������������������ʡ����ѧԺ���ױ��Ǵ�ѧ�Կ���ϵͳ��������Ȥ�������ڵ��о���Ҫ�Ǵ�ʵ�������������״̬������ʾ������о��������о�����ѧ�Ϻ��Ƚ���������ʾ�����ڵ��о������dz����Ի���ȴ���������Ի͵�ְҵ�����з����˺ܴ����á�
������1957��1958�꣬��������ְ��ŦԼ����������IBM�о�ʵ���ҡ���ŦԼ�Ƕ�ʱ��������������ݲ�������ϵͳ���ö��������ܱ�����ƺͿ���ϵͳ��������Ƶ�Lyapunov���۵����÷����������ش��ס���ʱ�����Ѿ�Ԥ�������ģ���ּ����ϵͳ����Ҫ�ԡ�
����
����������������
����1958�꣬�������������ѹʵ�Solomon Lefschetz�����RIAS��the Research Institute for Advanced Study���о������տ�ʼ��������Ϊһ����ѧ�о���Ա����������Ϊ�����Ρ��������Ƕ�ʱ�䣨1958-1964���������ִ��������۷��������˿����Թ��ס������ݽ��ͳ����ﷴӳ�����ľ������Ϳ������۷����о����������ڻ���ϵͳ������о�����ɿ��ԺͿɹ��Է��棬ΪһЩ��Ҫ�Ĺ���ϵͳ�춨�˼�ʵ�����ۻ�������ͳһ����ɢʱ�������ʱ�����������ϵͳ�����ۺ���Ʒ���Ķ��α���Ϊ����Caratheodory�����ſ������ۣ��������˺ܶ�ף���������Caratheodory���������ǽ�Pontryagin�����ֵԭ�����ܶ���-�ſɱ�-Bellman����֮��Ĺ�ϵ���Լ�һ��ı�ַ���
���������о�����ǿ����ѧ��һ���ԣ��������ּ������Ϊ��ƹ��̵���ɲ��ֺͿ���ϵͳʵ�ֵ���ɲ��ֽ����ۺϿ��ǡ�
������RIAS�ڼ䣬��������������һ�����������Ĺ��ף�Ҳ������ν�ġ��������˲�����1958���1959����ڼ䣬������ɢʱ�䣨�������ݣ����ⷽ��ȡ����һЩ�ɹ����������ڵĻ�������Ӧ����ά���˲���Kolmogorov�����¡���ũ���ռ��Ƿ�������ִ�״̬�ռ䷽���ϡ�������ɢ������о���Ȼ��Ȼ�ؽ�����������ʱ�����⣬����1960-1961���ڼ���R.S.������ͬ����ˡ�����ʱ��Kalman�˲�������
����
�����������ڵ�18������Զ��������ϻ����ݽ�
�����������˲����Լ�������չ������������������˲��������ִ��������۵ĽӴ��������ѱ����ڿռ��������������ƣ��簢���ɴ������״���ٵ������������̿����㷨����ᾭ��ϵͳ�����Ĺ㷺�ռ��������ּ��������Ч��������ƽκ�ʵʩ�Ρ������۵ĽǶ����������ǻ���һ����ͬ�Ĺ��˺Ϳ��Ƹ����Լ�����������֮��Ķ�ż�ԡ�
����1964�꣬������ǰ��˹̹����ѧ���ڵ������̣���ѧ���˳�ѧ���Ŵ����о��������ڼ䣬�����о��ɹ�ת������ʵ�����ۺʹ���ϵͳ��������ϵ�Ļ������⡣ͬ�£�Ҳ��һ�������������µ��о�;������һ�������ִ�ϵͳ������֧�Ų��γ���һ���µ��о�����
����1971�꿨������Ƹ��Ϊ��������ѧ���ڣ�����Ϊ��ѧϵͳ�������ĵ����Σ����Ľ������о���漰���������̡���ҵ���̺���ѧ�Ȳ��š�ͬʱ����Ҳ���ΰ����ҵѧԺ�о����ĵĿ�ѧ���ʡ�
���������������������ִ��������ۣ�Ҳ�ڴٽ���Ӧ�÷��������˹��ס����������˸�����ڴ�ѧ���������ҵ���ڶ���ݽ��������������о���Ա�������뷨ҲӰ���˺ܶ��ˣ���Ϊ�˹���ѧ��˼�뽻�����ƶ�������
����
�������������������ҿ�ѧ����
�����������ѷ���������ʮƪ�������£��������ི������1962���ʱ��������������ѧԺ��Ϊ��Ƚܳ������ѧ�ң�����1964��ΪIEEEԺʿ����������רҵ�����һԱ��Ϊ�ڶ��ڿ��ı༭ίԱ�����������ѧϵͳ����һ��ĺ����ߡ�����1974����IEEE�������£��Ա������ԡ��ִ�ϵͳ���۷����Ŀ����Թ��ף������ɿ��ԡ��ɹ۲��ԡ��˲����ʹ����ṹ����2008���ò��˹·˹����·�����꽱���ý�����Ϊ����ѧ���ŵ��������2009����������ҿ�ѧ���¡�
������������ʷ��������˴�ʦ
������������һ����ѧ�ҡ���ѧ�ҵ��뷨���Ǻ���ʦ��һ��������ʦ������ת�ĵ�һ����ͷ���ǡ�����ô�������ϵͳ��������٣��������ṹ��ʲô���ģ����� ѧ�����ȴ��ʲô��Ĵ����ԡ�Ψһ��֮����ͷ���ԵĶ����������أ���ô˵��ѧ��Ҳ����ƽ���ö�ʱ����ʦƾ����͡�ʵ�ɡ��������˰��죬���ֵó��Ľ����ȫ������������ʱ��������Щ���ԡ�����Ҫ�����˰����ٺ٣���ԭ����Щ�����ԡ�Ψһ��ʲô�Ļ������õġ�
��������Ҷ��������˹��ǰ���ڼ�������ǰ�����������Ƶ����������źŴ����ı任���������������ȫ��ѧ�����ҵ���Ѿ��γ�ͨ���任������������Ĺ߳�·��ʱ��ά�ɺͿ�������������족���������֮���ص�ʱ�����۲����硣ά���˲��Ϳ������˲��������ִ��źŴ��������ӽǣ�Ӱ���
����
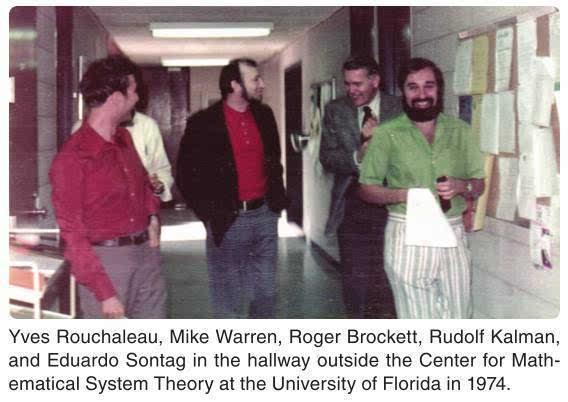
����1974��Ŀ�����
��������������ѧ���Ƶ������ɿغͲ��ɹ۵��������Ӹ����Ͻ����ʲôʱ��Ų���Ϲ��������⡣���ǿ������۵�һ����Ҫ��̱���
��������������ѧ�ϵ����Ա任�����Կռ�����۰ᵽ�������棬�Ӵˣ�����Ƶ������˹��ߣ�һ��ϵͳ���ſ���˳�۵Ļ����������ſ�����Ϊ������ô����ϵͳ�ı�����һ���ġ����Dz�ͬ�ĽǶ��в�ͬ���ô����еĽǶ���ƿ���������һ�㣬�еĽǶȷ���ϵͳ���ȶ�������һ�㣬������࣬�ڿ���������ͽ�����Ǹ������͡������ǿ������۵���һ����̱���
�����۲�״̬��Ŀ�����ջ��ǿ��ơ�ֻ������ķ���������������������������ķ��������Թ鵽��������������״̬���з����ľͽ�״̬�����ˡ���������Գ���ϵͳ�Ѿ�����Ч�ˣ���״̬����Ҫ�͵öࡣ�����룬һ��ϵͳ������״̬�������ε���ס������״̬���ԹԵ����ӵ�Dz�����Ǻεȵ�רҵ��̨�̵Ĵ����ǵ���߾���ѽ��
�����������˲�������ԭ��
����
�����������˲�������ԭ��ͼ
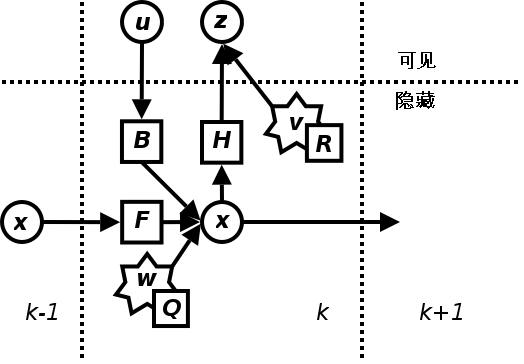
��������ѧ���Ƶ��˶�Ҫѧ�ִ��������ۣ���������˼ǵÿ�����������Ϊ�Ǹ��������˲�����Kalman Filter���������˲����������ķ�����³����·������������������
��������Ϊ���˲�������ʵ��һ��״̬�۲�����state observer���������������������ع���ϵͳ��״̬�����ع����������ʵ�����ӡ�������ϵͳ����ѧģ����ֻҪģ�;�ȷ����������ʵϵͳһ�������룬�����ԹԵذ�ϵͳ״̬��������������������ַ��̵Ľⲻ�����ַ��̱�������������һ����ʼ������Ҫ�dz�ʼ�������ԣ��ַ��̵Ľ����ʽ����ȷ�ģ�������ֵ��Զ��һ�ġ���������ϵͳģ�͵��ַ��̺��ټ���һ��β�ͣ���ʵ��ϵͳ�����ģ�ͼ�������������Ƚϣ��ٳ���һ���������ӣ��γ�һ��ʵ���ϵ�״̬��������״̬�ع���ƫ���������������˳�ʼ������������ϵͳ������⡣�������˲������֮�������ڿ������Ƶ���һ��ϵͳ�ķ��������Կ��ǽ�����������ϵͳ�����������������������������������������ӵĴ�С�����������ʵ���ǿ������Ķ�����¡����Luenburg��Ҳ�ó������ƵĽṹ�����Ǵ�ϵͳ�ȶ��ԽǶȳ������������������ӡ�ͬ���Ľṹ�������ڸ��֡�Ԥ��-У����ģ�ͽṹ����������ȷ��Ҳ�����������ܵ��������ĸ�������ͳͳ��������ѧģ�����ʱ��ʵ���Ҳⶨ����ʵֵ������У�����Ϳ��Խ����ѧģ�ͼ�ʱ���ص��ʵ���ҽ����ȷ���ص㣬����ʵʱ���Ƶ�Ҫ������������㾲̬�Ŀ������˲�����
�����������˲�����Kalman Filter����һ���Ա�֮�����Ƕ�һ�ְ���ij�̶ֹ���ʽ�仯��ϵͳ�������ŵķ���ȥ�������ϵͳ��ij��״̬��ֵ���������Ĺ��ף�һ������֤����������ķ����ǡ����š��ģ���һ��������������һ��������ȥ�������֡�����ij�̶ֹ���ʽ��ϵͳ��������˵�ġ�����ij�̶ֹ���ʽ��ϵͳ�����ڷɻ��ϣ������Ƿɻ����ٶȡ�λ�ã�Ҳ�����Ƿɻ���ij��������¶ȡ�ѹ�����ڻ������ϣ�������һ��С�����ٶȡ�λ�ã�Ҳ������һ�����˳���Χ���ϰ���ڽ����ϣ������ǹ�Ʊ�����ƣ�Ҳ������ij����˾��Ӫ��������ھ���ѧ�ϣ�����������������������ʣ�Ҳ������ij����Ʒ�Ľ����ڶ���������Ϻܶ�仯����������Գ���ɡ�����ij�̶ֹ���ʽ��ϵͳ�����������Ƕ��й�����Щ����ġ�״̬��������������Ӧ��֤���������˲�������Щ����¶������õģ���˿������˲����ܹ��������ǵ�����
����
���������������ĺû�������������������ѧ
�����ܹ�����ϵͳ��ij��״̬��ֵ֮�����ܸɵ�����Ͷ��ˡ�̸�ۻ����˵����ӣ�EKF-SLAM�������е����������˵�����ڵ����ӡ�����������һ��Kalman Filter�ܹ����ƹ�Ʊ�����ƣ���ô�ҾͿ�����ǰ�жϳ���Ʊ���������ǵ����ҿ����жϲ��˸����Ժ�����������ֻ���ж�һ�죬��Ҳ�Ѿ�����ͨ����Ƶ���ķ�ʽ����Ǯ�ˣ���ֻ�Ǹ���֪�����ѵ�˵���ƶ�һ�£��Ͼ��Ҳ��������ڵģ������⣬���ǻ����ںܶ�ѧ�ƺ�������֡�״̬���ơ�����Ҫ�ԡ�
�����������ڸ����������˲������㷨֮��һ�����β����Χ�ƿ������˲��������ˡ�����ϵͳ���ơ���һ�������ۡ�����ǰ���ᵽ�ġ�����ij�̶ֹ���ʽ��ϵͳ���������ð��������������ַ�������ʾ��Ҳ����������ϵͳ������������������ϵͳ�����ķ������Ӷ����ִ��������۵ķ�չ�ṩ�˷dz���ʵ����ѧ������
�����������˲��������Ӧ�û������״��ϡ���ν��ɨ��߸��٣������ÿ������˲������Ƶл���λ�ã������״�ļ�϶ɨ������ʵ��У����ʵ��Ӧ���л���һ�����͵����⣺��ʱ��ͬһ�����������кü�������ֵ���ã������еıȽ�ֱ�ӵ�����ȷ���е��Ǽ�ӵĹ��㣬�кܴ���ͺ�ȷ�ȸߣ���ʱ�����ÿ������˲����Ѳ�ͬ��Դ�����ݰ���ͬ������ȼ�Ȩ �����ϡ�������Ҳ�������ð�ġ��������ںϡ���sensor fusion����
����
�����������˲����������
�������������۵���ʷ��λ
�������˿������˲����⣬��������������ʵ�����õò��࣬���ǿ������������������Ͻ�����һ����ɫ�Ŀ�ܣ���������о����������м�������á�
����
����˳��˵һ�䣬�����������ۻ�������������ϵͳ��Ҳ����˵��ʮ�������һ���ף���ʮ�������������ף����dzɱ����ġ�ʵ��ϵͳ���кܶ�����Եģ���ǧ������������ٴ��ף�����ǧ������Ҫ���ײ���û�л��ˣ��г��Dz��Ǽ��ˣ�����ǮԽ�࣬�����Խ�࣬��һ�������Ե����⡣�����Ե������о�����Ҫ���ӵöࡣʵ��ϵͳ�����������ԣ��е�����νʱ��ϵͳ��������������������ʱ���ȼ�ϵ����Ķ��䣬ϵͳ���Ե�ȻҲ�ͱ��ˡ��ܶ����ⶼ�Ƕ�����ģ�������ת�䣬 ���ⷽ������һ�����룬���ź�ɲ��Ҳ��������������ǣ�״̬�ռ����������ѧ������Ϊ���ԡ������ԡ����������������ʱ�䡢ʱ����ϵͳ�ṩ��һ��ͳһ�Ŀ� �ܣ����ǿ��������Ĺ��ס�
����������������ˣ��繤�����ģ����������ģ���Ӧ����ѧ�����ġ��ڿ�����֮ǰ���繤������ռ������λ����ѧ���Ǻ������������תת�����������Կ������������¶������ڡ�ʵ�ɡ��ء�������֮��һ������ѧ�������ˣ����ö���ѧ���ߵ���Ϥ��ת���������ۡ�һʱ�䣬�������۵���ѧ���ƺ����ˡ����´��ƣ�˳���߲��������������ˡ���״̬�ռ�Ŀ���£������û��̫���������о����������Ż���Ϊ�������۵���ʱ�С�
��������˵21����������ΰ��ķ���������ۺ�������ѧ��Ȼ���Ҿ���21����������ΰ��ķ�����1944����͵�-��ũ�������Ϣ�ۣ�1948��ŵ����-ά������Ŀ����ۣ��Լ�1960��³����-���������������ϵͳ�ۣ��Ұ����ǽ���ϵͳ���Ƽ����������ۡ��ڡ����֮�ա�һ���У���Ϣ�ۺͿ����ۻ��й���ѧ�е�ϵͳ�۹����˹�ȷ�չ�İ��ء������ڷɻ���������Զ������豸�У����ǿ�����������ϵͳ�ۣ���������Ϣ�ۺͿ����ۡ�
����
����Kalman������˹ITMO��ѧ�����������ڳƺ�
�������������ս������һ���µ����磬Ҳ�����˺ܶ������Ĺ������⡢��ϸ�����������⡣�ɵø���ķɻ�����ø��ĵ������źŴ�������ģ�Լ����ƶ�������µ�Ҫ����ЩҪ����ʹ��ѧ�Һ���ʦ�ǿ����µ����ۺͼ�����Ҳ�ٳ���ϵͳ���Ƽ����������۵ķ�չ����Ϣ�ۡ������ۺ�ϵͳ�۰�����������������֮��ʮ���ﹱ�����µĴ���������ҵ�����ͻ����ˡ�����ϵͳ�ȵȡ�
����һЩ������Ĺ۵���ӽ�
������������ţ�٣�վ���˾��˵ļ���ϣ�ά�ɡ���ũ�ȣ�������ˡ�ϵͳ���������˲���ѧ����ѧԭ����������ũ����Ϣ���ǡ�ͨ�š�����ѹ������ѧ����ѧԭ��������ţ��д���ǡ���Ȼ��ѧ����ѧԭ�������о�������Ȼ��ϵͳ��������ѧ������������ά�ɡ���ũ�ȣ��о���������ϵͳ������ѧ�����ԡ�ϵͳ���������˲���ѧ����ѧԭ����Ҳ�ɽС����죨ϵͳ����ѧ����ѧԭ������
����
����������
����1.����ѧ�ߵķ��ࡣ�ɲ�����������ѧ����ʵ������ѧ�ҵķ��ࡣ���ۿ���ѧ�Ҽ��������ۼң���ʵ�����ѧ�Ҳ�����ָijһ��������Ĺ���ʦ������ָͨ��ʵ���ֶ��о�����ϵͳ���ԵĿ���ѧ�ҡ��ɲ������漸����
����2.��������ѧ�Ĺ�ϵ���빤�̵Ĺ�ϵ���ɲ�������ѧ����������ѧ������ѧ�Ĺ�ϵ���빤�̵Ĺ�ϵ������������ѧ��Ҳ���ǹ��̣����Ƕ����м��һ�㣬����ƺ����˶������ס�ͬ���ģ�Ӧ��˵������������ѧ�ң�Ҳ���ǹ���ʦ������ʵȴ�ǣ���ѧ����Ϊ�����������ǹ��̣�����ʦ��Ϊ��������������ѧ�����˴�δ��ʶ����һ�㡣
����3.��������������ѧ�ƵĹ�ϵ������ѧ����������ѧ��������Ҫ����������Ӧ�õ�ijһ������������ڡ����������о�����һ������ϵͳ���������Ĺ��ԣ�������Ҫ������ijһ����ѧ�ƶ����ڡ�
����4.���Ƶ�δ����ʮ������ĩ����ʮ���ͳ����������ѧ����Ϊ������ѧ�Ĵ��ã�ţ����ѧ���Ѿ����ͣ�ʣ�µ�ֻ����������������˵����������ѧ������յ�Զ������������СС�ġ����˲��������ơ������������ƣ�ָ���ǵ�ʱ����ѧ�����͵�����ʵ�飬һ���Ǻ������ʵ�飬��һ�������˶���-Ī��ʵ�顣�������䡰СС�ġ����ƣ�ȴ��֤��������Ƭ����յ�ͶӰ���������������ѧ�����Ҽ�ʹ�����ڣ�����ѧ�Ĵ����Dz����Ѿ����ͣ��Dz����Ѿ������������أ������Ѿ����ͣ���û�����ƣ��������۵��������������ѧ����ʲô�����ơ������������ѧ�ƴ����Ƿ��Ѿ��Ǻã����滹�����˲���������������ѿ��ơ��������������״������ţ��ʱ������ô����ۡ�������ѧʽ�ijɹ�����ܳ�������Щ���棿
��������������⣬the bottom line is��δ�����ǿ�����ȫԤ֪�ģ�ֻ�ǿ�����һ���̶���Ԥ֪������Ԥ��ԽԶ��ȷ����Խ���ⲻ�������˿������˲���ѧ��һ������Ŀ�Դ���һ����������Ϊ��
����
�����������ڷ�������ѧ�ڿ�
����5.������������ά�ɡ���ũ�ȣ��Ѿ���ȫ���ʸ��ŵ��������ѧ�������˽����ڼ���ֻ�����Ȼϵͳ����ѧ�ҡ�������ʵ��Щ������һ�����е㵭��������˺����� LED����һ���棬Ҳ�����ר���и�����ǹ�������ϵͳ������ѧ��
����6.������һ���̶��������truth�������� truth ����ֻ��������ij����Χ�����翨�����˲��������Ը�˹������ϵͳ�� truth����ͬʱ��EKF��UKF ���� PF��arguably����δ�ﵽ truth��level����һ���ϣ�Ҳ�ɲ�������ѧ�����������ڶ������ģ�ͣ�����˵���Ǵ��ģ�����ֻ��һ���ǣ�ij����Χ�ڵģ� truth level �ģ�����Ҳ����֤ʵֻ�ܵȴ�֤α��
����7.Control�Ƿ�dead�������ʼ��ǡ��������4�Ļ������Ǻ���˵����Ϊ���ܴ����Ѿ����ͣ�Ҳ�����и���������ա��������6�Ļ�������˵�ܶ����۲����ö���˵������������������۲������ƺ�����������չ�еıؾ���ֱ���ҵ��Ǹ� truth level �ģ����������۸����Լ������÷�Χ������Ǹ�����Χ������truth level������ֻ��һ������ȷ��Χ�����ڸ�����Χ�ڷ��ӵ��������ҵ��Ǹ�truth level�ģ�����������
����8.����ѧ���Ƿֲ�ġ�1�з�Ϊ���ۿ���ѧ����ʵ�����ѧ�ң����ܲ������ʺ�ȫ�档���ֲ��Ǵ��ڵġ�����Kalman��һ�㣬���� UKF��PF����һ�㣬���� SLAM ����һ�㣬�������ϸ����㷨�����Ա�����ֵ���������������������һ�㡣����Ӧ�õ�Ҳ�ֲ㡣�����¿�ܵ���һ�㣬�����п���µ��ε���һ�㣬���������һ�㣬�����еĿ���Ӧ�����������ַ������ۣ���˵ȵȡ�����ֲ㣬���������ߵͣ����Ƕ�λ���ܶ�ʱ����ȷ��Щ����Ҫ����������о�group����������������˾λ�õ�Ҫ��ͬ�����������о���ͬ����������Ӧ�ã���λȴ���ܺܲ�һ����
����9.��һ��˵���ǣ���Ϣ�۵�һ����������ũ���ڶ�����Gallager����������Tse�������˵�������˲����۵�һ��������ά�ɣ��ڶ����ǿ������Ļ���˭�ǵ��������ţ�
����
������������ѧ�������ֳ�
����R.E. Kalman������Ȼȥ���ˣ������������в��������ġ���������������Kalman Filter����ҹ��ͣ�����У���Ϊ�ȶ�����Ŀ�����ĬĬ�����š����ľ���Ϊ���룬�����������������С�
����His passing not only brought about personal loss but also a sad reminder of the passing of a golden era in systems and control.
����������ȥ�����IJ������Ǹ��˵���ʧ���������ı�־��ϵͳ����ƵĻƽ�ʱ������ȥ��
��������ʱ��
��������ϵͳ����ƵĻƽ�ʱ����û�е�����ά�ɺͿ����������Ķ�ս���������ǰ�����ʮ��ʱ�䣬��ϵͳ����Ƶĵ�������ʱ��������ϵͳ��Ϊһ����������ij����������̺��˷ḻ�����ʣ��������Ѿ��������Զ����Ƽ����������������Ա������������ˡ��Կ�����Ϊ��ǰ���ǣ������ھ�������ϵͳ�ķḻ���ʣ������ǽ�ʾ���Զ�����ϵͳ�������ѧԭ���������岻����д������Ȼ��ѧ����ѧԭ������ţ�١�
����
����һ����ʦ�������ٻ��������ҿ�ѧ����
����ţ���˶�ѧָ��������������������֮������ŵ�һ�λ���ţ�ٵ�������Ƴ�������ܹ�̽�������������˶������Ǻ����̽��������ϵͳ������������ֻ�����˰�����ͣ�������δ������Щ���ۻ�����������������Ĺ��ס����û������ţ���˶����ɵ���������Ϊ����û���㹻���ƽ���ȼ�ա����Ϻ�ͨ�ż�����������Ƶģ����Ӹ��Ļ�����û������ϵͳ�������۵�����Ҳ����Ϊ���û���㹻�IJ��ϡ�����ʹ�����������
������Ҳ�������ɵ����ţ���δ����һ�����У�������ӵ���˸���ļ���֮��ϵͳ�����������ۻ���������������������ܿ���ϵͳ��������������Ԥ��δ���Ļ��������ʼ��������ӵĻ����˺�����ϵͳ��ʱ��ϵͳ����ƵĻƽ�ʱ���Ż�����������
��������������������ϵͳ���ۣ��ᱻһ����һ���Ŀ�ѧ�Һ���ʦ��˼������ϰ����չ�����Ժ���Ҳ�����е�һԱ��
������Դ������ľ��
����C2ѧ����ڻ
��������Эͬ�ֺ�������Ӧ����Ԯ���ֻ
��������ʱ�䣺2016��7��11��
��������Խ����2016����������ϵͳװ���뼼����չ��̳��
��������ʱ�䣺2016��9��-10��
���������·�ѧ���ά�룬��עѧ����
������л��ע






























����˵�������а�