 )
) 
智能手机里配置了很多传感器,GPS、陀螺仪等等,这就使得汽车遇到智能手机的时候会出现很多新的应用。
俞嘉地(上海交通大学计算机学院副教授)

▲上海交通大学计算机学院副教授俞嘉地认为,通过智能手机的传感器可以感知到车辆的行驶状态,监控到非正常驾驶行为、粗心的驾驶行为以及交通模式,当然还有一个主要的作用是识别驾驶员和乘客。
随着技术的发展,智能手机越来越发达,当汽车遇到智能手机的时候,我们看看会擦出什么样的火花。
功能手机主要是用来接打电话,这个时候当汽车遇到电话的时候很容易出现的场景就是事故。来自2015年的数据统计,美国18%的车辆事故都是由开车接打电话造成的。
随着科技的发展,接打电话只是智能手机很小的一部分功能,娱乐、社交、支付等都可以通过智能手机实现。得益于互联网和智能手机技术的发展,智能手机里配置了很多传感器,GPS、陀螺仪等等,这就使得汽车遇到智能手机的时候会出现很多新的应用,比如导航技术、专用安全技术等。
今天研讨的主要是UBI这个问题,在保险行业我们希望能够得到用户的驾驶行为数据,怎么才能监控到用户的驾驶行为呢?那就是我们现在最常用的方法,简单暴力,就是摄像头。
但是摄像头安装成本非常高,这都应该是政府行为,不允许哪个公司私自在车里安装摄像头。而且摄像头受天气影响也非常大,比如说大雾刮风下雨这种极端天气下,摄像头的效果就不会很好。
如果从保险公司的角度来说,想把这些数据拿过来,政府不一定给你,因为这里可能牵扯到很多个人隐私等等。那么,用什么方法得到用户驾驶行为的监控呢?我们就想每个人身边所具备的一个什么东西,就是智能手机,基本上人手一台甚至两台,我们希望用智能手机来得到用户的驾驶行为数据。
通过智能手机的传感器可以感知到车辆的行驶状态,监控到非正常驾驶行为、粗心的驾驶行为以及交通模式,当然还有一个主要的作用是识别驾驶员和乘客。
感知车辆行驶状态
如果我们想用智能手机来感知车辆,首先就要确保手机是放在车里头的,由于车的运动造成手机的运动,手机的传感器就能感知到车的运动行为。我们必须要保证的是,手机和车辆必须是同一个方向,坐标要一致,我们才能用手机准确感知到车的运动形态。
没有人上车就会把手机放到和车一致,我们所要做的第一个工作就要把手机的坐标摆的和车一致,这就需要通过旋转矩阵。
假设在这里头看到是一个车的坐标,这是电话的坐标系,希望通过一个旋转产生一个两者的坐标一致,这样就通过旋转矩阵。旋转矩阵怎么得到,非常简单,车辆只有在前进的过程中才有加速度,其他方向不会有加速度,只要把这样的方向分解以后,我们很明确就能得到旋转矩阵。有了这样的基础,我们就能做下面的工作。
首先讲的是基于手机的加速度传感器感知车辆行驶状态。
车辆行驶状态主要考虑转弯和换道。可以把转弯看成圆周运动,经过圆周运动有车的速度、有向心加速度,向心加速度可以通过陀螺仪得到。转弯时候向心加速度会有非常明显的变动曲线,我们可以确定它是一个转弯的活动,有了这样的基础再来讨论换道的识别行为。
在向右换道的时候首先把车轮向右打然后再返回来,在这个时候我们能看到在X轴横向加速度会有一定的数据,整个过程会产生正弦波,也就是先有一个顺时针的方向再有一个逆时针的方向。
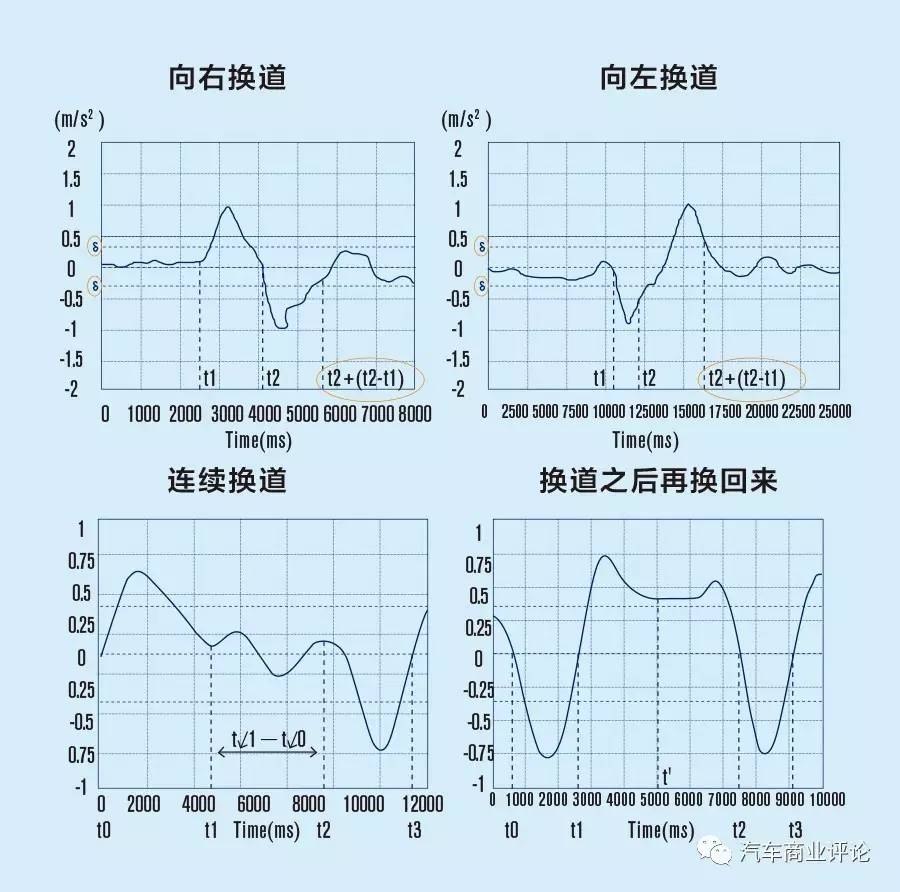
▲向右换道产生的加速度明显能看到是一个正弦波的形式。向左换道是余弦波的形式。连续两个向右换道是两个正弦波。如果换过去再换回来,会产生余弦波再产生正弦波。
除了向右换道、向左换道,还有连续换道、换道之后再换回来一共四种基本形式。向右换道产生的加速度明显能看到是一个正弦波的形式,向左换道是余弦波的形式。连续两个向右换道应该是两个正弦波,如果换得比较快,发现这样两个正弦波形式中间会有一个抵消。
如果换过去再换回来,当然会产生余弦波再产生正弦波,事实上,换道过程比较快,波峰会有一个融合。很幸运的我们发现波峰形成的面积会等于波谷两个面积的和,这样的面积只要求一个积分就能很简单得到。
有了这样清晰的模型以后,我们就能很快分别各种换道的形式。
换道还要考虑换了几条,很多朋友开车的时候直接两个车道就换过去了,如果车辆不是很多的话,大家不会一道一道换。我们来计算这样换道的模式一样可以通过圆周运动来进行。刚才说了我们知道向心加速度,也知道速度,就能求得半径和这条弧的长度,这样就能计算出车辆平移的距离,如果有车道的宽度很容易就能知道换了几道。
通过实验的结果,准确率都是比较高的。单换道可以得到97%的准确率,连续换道达到93.02%的准确率,计算换了几个车道可以得到95.3%的准确率。

▲知道向心加速度,也知道速度,就能求得半径和这条弧的长度,这样就能计算出车辆平移的距离,如果有车道的宽度就能知道换了几道。
非正常驾驶行为监控
保险行业非常关心的就是驾驶员的非正常驾驶行为。根据美国交通局的统计,有六种非正常驾驶行为:来回换道、急转向、侧滑、快速掉头、大转弯、急刹车。我们通过这六种行为做一个研究建模。
我们探讨这六种行为的时候发现,其实每种行为在加速度传感器、方向传感器都有自己特殊的模型。根据这些模型来做特征的提取,我们发现正常驾驶行为和非正常驾驶行为的区分是非常明显的,但是每一种行为的区分就比较混合。我们再多加入一些比较因素的话,就可以两两区分开。
通过这样的技术我们总共提取出16种特征,再用机器学习的方法产生各种行为的分类器,利用分类器对非正常驾驶行为进行监控。简单的测试结果准确率都能达到95%以上。
监控疏忽的驾驶行为
刚才一直探讨车的行为,车的行为会反映人的驾驶行为,但是有的时候车子行为并不能反映到人的驾驶行为。
例如在车上抽烟、吃东西,这个大家都经历过,一样能把车开得相对比较平稳,但是在车上抽烟、吃东西,甚至你在开车时捡东西,这些行为实际上已经出现了安全隐患,我们是不是应该对这样的行为也来进行一下监控。这个时候我们就需要用另外一个传感器,也就是智能手机中声音的装置进行监控。
这个监控也主要得益于平移,当我发出声波的时候,如果人有运动的话,会明显对声波有干扰。美国交通局给出了四种有潜在安全危险的疏忽驾驶行为类型:一是开车时向前伸手拿东西;二是开车时吃东西;三是伸手到后排拿东西,或者照顾后排的孩子;四是捡东西。这些行为有些人经常做,但是并没有发生事故,大家都不太介意,但是这种行为已经对交通安全造成了隐患。
如何对这种行为进行监控呢?我们主要通过声波,声波的技术首先是发出20赫兹的超声波,人是听不到的,而且不受外界干扰,比如音乐或者窗户打开后外面的噪声都不会打扰到这个声波。在麦克风另一端能收到44.1赫兹的波,一个发送一个接收,这个过程中如果人发生运动,声波会有一些变化。
每一类疏忽驾驶行为都能形成各自的模型,我们通过机器学习提取这些模型就能够清楚分辨是哪一种疏忽驾驶的行为,一样通过PCA(Principal Components Analysis,主成分分析法)技术分析,只需要两个特征就能两两分别,两两分开以后就可以再把它们合成一个多特征的分类器。
如果从监控的角度,或者保险公司想知道这个人的驾驶行为,这个分析模型已经够了。但是在保险公司推行UBI保险的时候,你让用户去安装,人家为什么要安装你的APP?有的人可能对价格折扣不敏感,用户更希望当我出现这种驾驶问题的时候,APP能够提醒。
像刚才说的疏忽驾驶,其实不是一个瞬时行为,是一个时段比较长的行为,摸东西捡东西是一个长行为,当事情发生完了以后,你再告诉我,已经来不及了。我希望事情发生中你就能告诉我,越早告诉我越好,提醒我的驾驶行为有问题,让我修正我的驾驶行为。
这就要求技术能够达到早期的识别功能。我们通过行为的延迟时间和完成度之间的关系重新建立一个模型森林,然后尽可能早地发现疏忽驾驶行为,并且给司机做出提醒。
经过初步实验,我们看到平均精确率达到92%,大概有85%能在行为发生一半之前就可以完成提醒。
这就是我主要研究的三个课题。人的驾驶行为不一定只有这几种是不安全的,还有一些行为没有分进去。如何在这六个行为以外,如果再发现新行为的话怎么把它加进去,这是我现在正在做的技术。(选自俞嘉地在“携手·迎新 2016汽车智能网联与车险改革创新融合闭门研讨会”演讲,ABR记者张硕根据现场录音整理)
END
欢迎投稿分享,readers@autobizreview.com;
商务合作请洽曹女士,18612438597

点击“阅读原文”报名参加第三届金轩奖颁奖典礼































我来说两句排行榜