 )
)����
�����Զ���ʻ�����ü����״��������״�ɱ��㹻�͵Ļ���ADASҲ��Ҫ�ü����״��������ͷ��ADAS�����˼�ʻϵͳ������˵������ͷΪ���ĵ�ADAS�����˼�ʻϵͳ���ܶࡣ
����������FOV�����⡣
����
����Ϊ�˱�֤���㹻Զ��̽����룬FOV�ĽǶȲ���̫����͵��³��������зdz����Ե�ä����һ��CMOS��������ľ�ͷFOV������76�ȣ�����76�ȾͿ������Ǿ�ͷ����Ǿ�ͷ�ڽ��������Ե�ʧ�棬����120�Ⱦ������۾�ͷ��ͼ���Ե�����ص�ʧ�档һ��AEB��FOV��45�ȵ�52��֮�䡣
����˫Ŀ��úܶ࣬ȫ����õ�˫Ŀϵͳ���ձ�˹��³��Eyesight���ڶ���Eyesight��FOV��25�ȣ���������35�ȡ�Ϊ�˱�֤�߱�ͬ����̽����룬������Eyesight�Ļ��߳��ȴ�30�������ӵ�35���ס�
����Ϊ�˽��FOV�����⣬��˹�����ֶ����������ĿTrifocal��
����
������ͼΪ�ֶ��ֵ���Ŀϵͳ��FOV�ӽǷֱ���140�ȡ�45�Ⱥ�34�ȡ���˹����150�ȡ�50�Ⱥ�25�ȡ��ƺ����������FOV��ì�ܣ�����û��ô�����������۾�ͷ�������أ���Ҫ����ʧ�棬һ���Dz��ò�ֵ��������ʧ�治����100%������ͼ������Ҳ������½������б�Ե�����ػ��ж�ʧ���κβ�ֵ�������ֲ������ʧ���������Ҫ�ķѴ�����������Դ��������������ͷ��λ�ã���˹�����ֶ��ֶ������϶���һ�����á�45�Ȼ�50�ȵ�����ͷ��ȻҪ���У����ۺ�խ�ӽǾ�ͷ�������������࣬�������������ϣ���͵����ӽǸ���ƫ��һ�࣬����Ҫ���㷨У���������������ͷ�����ظ���Ϣ����Ҫ�����˲������ˣ�һ�������չ�����˲��������Ȼ������Ϣ�������½��������㷨�ĸ����ԣ����ӳɱ���
������Ŀϵͳ��Ȼ���н�����ä����
��������ǵ��ٵ����⣬����ͷϵͳ�ر��ǵ�Ŀϵͳ���ڳ����������ٺ���Ե�������±��ֺܲ��ͻȻ���ֵľ�ֹĿ������ƶ�Ŀ�꣨һ�������ˣ�������Ч��һ�㴿�Ӿ���FCWϵͳ��������ٶ���ʱ��30���Mobileye��˵��������ȷָ����
����
����MobileyeҲָ������һ�ֵ���FCW��ΪUFCW��������̫�ߣ����Ժ���ʹ�á�һ��Mobileye�ᵽFCW����ָʱ��30�������ϵ�FCW�����Ϻ��ײ��״��ں����ݺ��������ʱ�ٿ����½���10-15�����Щ����ָ����ʶ�𣬶�����ʶ��Ҫ���ٶȸ��ߡ�
����
����Mobileye��ȷָ��ʱ��50����������ʶ��Ź�����
����Ϊ����Ҫ��˸ߵ��ٶȣ�
�������Ҫ˵˵��Ŀ����ͷ�Ļ��������ˡ����Ȼ����Ӿ���Ҫ��Զ�̬Ŀ��ʶ���ر�����������̬Ŀ��ͨ��������ľ��������ȣ�����ʶ��̬Ŀ���糵�������ˡ����г����綯���ȡ���һ����Ҫ�ر�ָ����ʶ��Ŀ�겻������Ŀ�ģ������ϻ����Ӿ�������Ŀ���Ǽ�����������ϰ���֮��ľ��룬ʶ��Ŀ��ֻ����������ϵ�һ�����������״������κ�Ŀ��ʶ�𣬾��ܹ��ṩ��ȷ��360�ȸ�����ľ�����Ϣ����������״�ɱ��½����Ӿ�ϵͳ2���ijɱ�����ô���ѧϰ��Ŀǰ�������ѧϰ����ͼ��ʶ�𣩽�ʧȥ���塣
����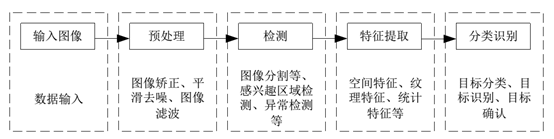
������ͼΪ�����Ӿ��Ĵ������̣�����Ҫ����Ϊ����ͼ�������ͼ�����Ԥ������Ԥ�����ķ�����Ҫ��ͼ�������ƽ��ȥ�롢ͼ���˲��ȣ�Ԥ����֮���ͼ�������� ROI ����������쳣���ȣ������Ѿ����������������������ȡ����ʶ��ȡ�
������һ��Ҫ���˶�Ŀ��ӱ���ͼ�зָ��������Ҳ�����ѵ�һ����Ŀǰ�ж��ַ�������û��һ����ͨ�õġ���������ַ����ǹ�������֡���ͱ������
����
���������˶�Ŀ��ָ��ַ�Ϊ 2D �� 3D���ڻ����˶��� 2D �ָ���п��Է�Ϊ���ڹ����������ķָ���ͻ��ڱ仯���ķָ���������������ķָ����Ҫ������ͼ�����ص�λ�ƻ��߹������ɲ�ַ�������ƥ�䣬ͳ�Ʒ�����ɡ�ʹ��ģ��ƥ�䷽���������ص�Ľ����ٶȡ� Spoerri���ҵ�������֮ǰʹ���˶��߽�ļ�⡣ Overingtonʹ�ò����������仯ȥ��⾲̬�����˶�Ŀ�ꡣ�仯�������˹����������ݶȵļ��㣬��֡����ۼ�֡���ɡ� 3D ���˶��ָ�����Ҫ�ɲ������� SFM ����ɣ� SFM ����Ҫ���� 3D �����Լ������˶��ļ��衣��������ֻ�ܼ�������˶��ķֶγ�������������Ҫ�� 6 ������ 8 �����Լ� 12 ������ SFM ������Ҫ�����Է��ͷ����Է�����ɡ�
�������ǵ�ʵʱ�Ժͳɱ���Ŀǰ��������֡��ַ������ַ��������������������Դ�������٣������״ﵽʵʱ�ԣ�ȱ����ǵ����±��ֺܲ
������ν֡����ͼ������֮֡������ر仯��֡��Ļ���˼���ǣ��˶�Ŀ����Ƶ�У����Ը���ʱ����ȡ��ϵ������������ͼ������Щ���ڵ�����ͼ���У������������仯��С�����˶�Ŀ������ر仯�ϴ�����Ŀ���˶����µ����ر仯�����Էָ����˶�Ŀ�ꡣ֡����Է�Ϊ��֡��ַ�����֡��ַ���
������֡��ַ����ǽ���Ƶ�ɼ���ʱ����ͼ���������֡ͼ����в�֡������ڵ���֡ͼ����в�ֿ������κξ��и��ӵ�ͼ������(���磬�����������ҶȾ�ֵ��)�Ͻ��С���ˣ� ֻҪ���������뱳�����˶�������ɼ����������ݸ�������ֵ�Բ�ֽ����ֵ��������ֵͼ����ڸ�����ֵ������Ϊ�����ص���ǰ��Ŀ���еĵ㣬���������ص���Ϊ�˶�Ŀ���һ���֣�����ֵͼ��С�ڸ�����ֵ������Ϊ�����ص����ڱ���Ŀ��㣬�Ӷ����˶�Ŀ��ӱ���Ŀ���зָ������ͼ�������ֵ�ָ�֮��ͨ�����������������ʹ����̬ѧ�˲��ķ�������������˥����˥��������õ���ͼ���˶�Ŀ������һЩ�ն�����Ҫ������ͨ�Դ��������ſɵ��б�Ŀ�ꡣ��ֵ�趨̫�ͣ���ⲻ��Ŀ�ꡣ�趨̫�ߣ��ᱻ���Ϊ�����ֿ������塣ͬʱ���ڱȽϴ�ģ���ɫһ�µ��˶�Ŀ�꣬���ɫ�������֡���ַ�����Ŀ���ڲ������ն����������ָ���ȡ�˶�Ŀ�ꡣ
����
��ͼΪ��֡��ַ�����
����Ϊ�˽����֡��ַ���ȱ�ݣ������������֡�����
����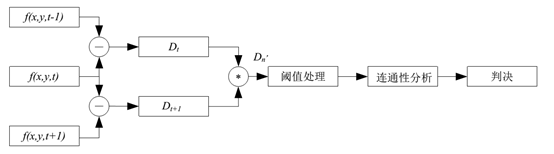
��ͼΪ��֡��ַ�����
������֡�������֡�ԭ����ͬ��Ч���Ժã�����Ҫ����������Դ���ٶ�ͨ������֡���5����һ����֡���15Fps����ƽ��ʱ��Ϊ25���롣
����������������֣�������˼�������ñ����IJ���ģ�������Ʊ���ͼ�������ֵ������ǰ֡�뱳��ͼ����в�ֱȽ�ʵ�ֶ��˶�����ļ�⣬��������ϴ������������Ϊ���˶����������С������������Ϊ�DZ�������������������Ҫ�б���ͼ���ұ���ͼ����������Ź��ջ��ⲿ�����ı仯��ʵʱ���µģ���˱����������Ĺؼ��DZ�����ģ������¡������ν������ڲ�ͬ�����Ķ�̬�仯����������Ӧ�Եı���ģ�ͣ����ٶ�̬�����仯���˶��ָ��Ӱ�죬�о���Ա��������������ģ�㷨�����ܵ��������Ը���Ϊ�ǻع���ƺͻع�������ࡣ������ַ��Թ��ձ仯�Ͷ����쳣���У������϶���Ҫ�����ģ��ұ�����ַ���������Դ����࣬ʵʱ�Բ��ѣ��Ƚ��ʺ����ڼ�أ����������ʺϡ�
������������Ŀǰ���ţ����ʵ���ƽ����Լ�������£�����ͼ�����е�ʱ���ݶȹ����˶�����ͨ�������˶����ı仯���˶�Ŀ��ͳ������м����ָͨ���л���ȫ�ֹ���������������������ַ���������ȫ�ֹ��������㷽����L-K(Lueas&Kanada)����H-S(Hom&Schunck)�����õ�ȫ�ֹ�������ͨ���Ƚ��˶�Ŀ���뱳��֮����˶�������˶�Ŀ����й����ָȱ���Ǽ������������������ͨ������ƥ���������㴦�����٣����м�����С�����������ص㣬��ϡ��Ĺ��������Ѿ�ȷ����ȡ�˶�Ŀ�����״���ܵ���˵������������ҪԤ��֪���������κ���Ϣ�����ܹ����˶����ɴ��������˶�������������������Դ����Ӱ���ڵ������ػ�Թ������ֲ��ļ������������Ӱ�죻���ҹ��������㸴�ӣ�����ʵ��ʵʱ������
�����Ե�Ŀ��˵��Ҫ���þ�����Ϣ��������ʶ��Ŀ�ꡣ
����
����Ҫ�ṩĿ�������Ϣ������Ҫ��Ŀ����п�ͼ�ָ���ָ��ʶ����һ��ģ���ʶ����ȷ�ָ
����ͼ��ʶ���Ϊ�����࣬һ���ǻ��ڴʰ�ģ�͵�ͼ��ʶ��һ���ǻ������ѧϰ��ͼ��ʶ��
����Csurka���״ν�����Ȼ���Դ���������� BoVM(bag of words)ģ�����뵽ͼ����������ǽ�ͼ�����Ϊ�ĵ�����ͼ����Ϣ�����ɵ��ʱ�ʾ�������õ��ʵ�Ƶ��ֱ��ͼ��ʾͼ�����ȣ���һ��ͼ�������������������������������������Ӷ����������������ȡ���������Ӳ��û���ѧϰ�ķ�������ѵ�����������Ƶ�ʱ�ʾ���Ӿ�������ɵ��Ӿ��ʵ䡣���ͨ���Բ�ͬ�����Ӿ�ֱ��ͼ����ѧϰ������Ի��ѧϰģ�͡��ڲ��Ի��ڣ���ȡ������ͼ�����������ô�����ͼ����Ӿ�����ֱ��ͼ����������õ�ѧϰģ���������ͼ���Ƶ��ֱ��ͼ����ƥ�䣬��÷���ʶ�������ɴ˿ɼ����� Bag-of-Word Ӧ�õ�ͼ�����ģ����ͨ����Ҫ��������:1) ��������������� 2) �Ӿ��ʵ�Ĺ����� 3) ��������
�����Ӿ��ʰ�ģ��(bag-of-words)��Ա�����ģ�������������������ڴֵ�Ӧ�ó��ϣ����Լ�ֱ�۵ذ�ͼ���ʾ��ֱ��ͼ���ֳ����������Ϳ���ʹͼ�����ʶ������ת������ͨģʽʶ�����⣬����������Դ�١����ǣ��Ӿ��ʰ�ģ��Ҳ��һЩȱ�㣺 1)ʹ���������Ӿ�����ֱ��ͼ��ʾ�������ת���Ĺ����У�����������λ����Ϣ����һЩ��Ҫλ����Ϣ���о��У���ǰ��ͻȻ��������壬ͻȻ���ֵ����ˣ�������������Dz��ʺϵģ� 2) ���Ӿ��ʰ�ģ�ͽ������ڵ����뵥��֮��������Ļ����ϣ�������Щ����������뵥��֮���ǻ�������ϵ�ģ�����������Ƶ����ˣ��Ӿ��ʰ�ģ�������������ʹ�ã������ʶ�����ϲ
�����ʰ�ģ��ʵ�����൱��ֻ������һ���������һ����۲㣬��ģ�Ͳ����ල��ʽ������������ѧϰ��������������������˸����ļ�����ϸ�������Խ��и�Ϊ���ӵ������任��������ѧϰ�������мල���̵ģ��˲���Ȩ�ؿ��Ը������������Ͻ��е������Ӷ�ѧϰ������������������������Ƕ�������������������и�Ϊǿ������������������������ͼ��ʶ�������еij�ɫ���ܾͺ��������ˡ�
�����ָʶ����ǹ�����룬��Ŀ���������Ҫ�Ǹ������ش�С�����ַ���ȷ�Ȳ��ߡ�
����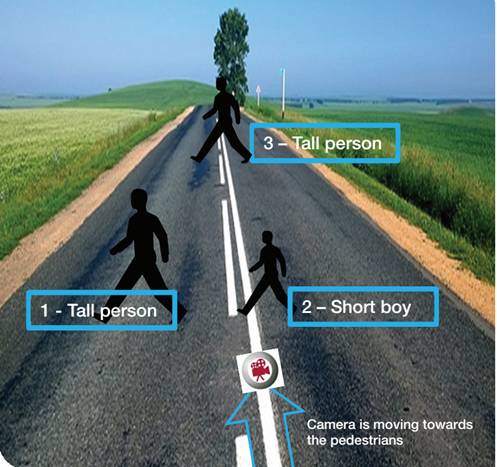
�������ھ������أ�����3������2�����ش�С�Ƿdz��ӽ��ģ�������2������3�복�����������ܴ�Ŀ���ó�ȷ�ľ��롣
����
������ͼΪ����SFM�ľ�����㡣����Կ�����ϡ���������ȱ����������Դ���Ķ࣬�ҶԹ��߱仯�Ͷ����Ƚ����С�
����˫Ŀ�뵥Ŀ�����м��㣬����˫Ŀ�Dz���������ǹ��㡣
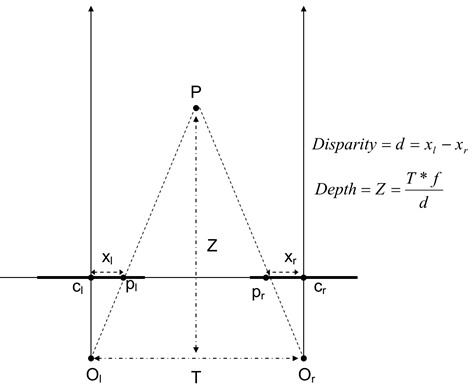
������ͼΪ˫Ŀ�ľ�����㹫ʽ��ȷ�ȱȵ�ĿҪ�ߵöࡣ
����˫Ŀ�뵥Ŀ����ĵڶ�����˫Ŀ�����ڲ�ʶ��Ŀ�����������ȣ����룩���ݡ�
����
������ͼΪ˫Ŀ�ĵ���������ͼ��˫Ŀ����������һ�����ͼ��
����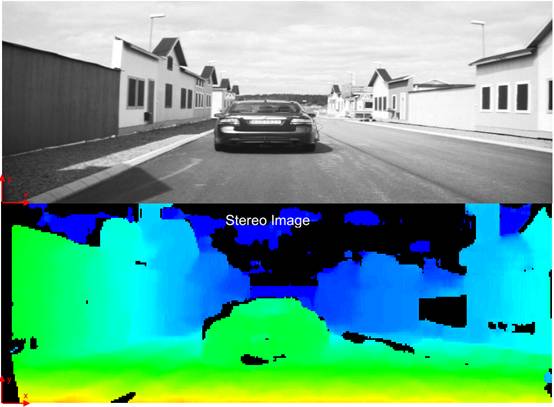
��������ɫ��dz���������롣˫Ŀ��Ȼ����Ҫʶ��Ŀ�꣬����˫Ŀ��Ҫ�����ָSegmentation������ʹ�õ��㷨��Belief Propagation��Mean Shift��˫Ŀ��ؼ��Ļ���������ƥ�䡣
����˫Ŀ������ͼ��ֱ����������AEB֮��Ĺ��ܣ��͵�Ŀһ��������Ҫ���˶�Ŀ��ָ��������ÿһ�����ص㶼���Ӳ�������Ҫ�ķѴ���������Դ��������Ҫ�Ļ�����ǰ����ͼ��������Ӳ����Ҳ������ROI����
�������Ӿ�ϵͳ��˵�����۵�Ŀ����˫Ŀ������Ҫ�˶�Ŀ��ָ���٣�����벻��֡����������֡�������Ӿ�ϵͳ����������ȱ�ݣ�һ�ǵ���״̬�£����������ϰ���ر����ƶ�������ֹ���ϰ�����Ƕ�ͻȻ���˶�תΪ��ֹ���ϰ��������Ч����Ҫ�ϳ�ʱ��������ʶ����ǰ���������Ʒ��
�����Լ����״���˵���˶�Ŀ��ķָ�Ҫ�öࡣ
����
����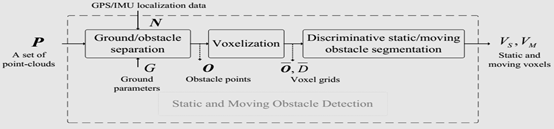
�����붯̬����ȣ���̬���岶��ĵ�������ȻҪ�ࡣ��VOXELGRID�˲����������ɽ�����Ŀ����룬ͬʱ���ü����״�ǿ�ȳ�����ص㣬����������ʶ��־�̬Ŀ�꣬�糵���ߣ���·��Ե��������ݵأ���ľ��·�Ƶȡ�
����ʱ�ٵ���30��������˼�ʻϵͳҲ��Ҫ�䱸�����״���㰲ȫ�����ǵ���Ŀ�Ӿ�ϵͳ��̽����룬���Ӧ�����ʱ��һ�㲻����65���˫Ŀ����Դﵽ90������������Ǹ��ٹ�·�����˼�ʻ���dz��е�·�����˼�ʻ�������״ﶼ�DZ���ġ�
����
�������쵥λ
����
������̳����
�����й�ADAS���Զ���ʻ�ķ�չ����
�����Զ���ʻ�����м�������ҵ�ı��
�����Զ���ʻ�����İ�ȫ�뷨���̽��
�����Զ���ʻ�е��Ӿ�����
��������������ADAS����
������������ͷ��ADASϵͳ�е�Ӧ��
�������غ��ײ��״��ʶ����
������̬�����״�ķ�չ����
�������ִ�������ADAS���Զ���ʻ�е�Ӧ��
�����߾��ȵ�ͼ�ֽε�Ӧ��
����˫Ŀ�뵥Ŀ���������
�����Զ�����ϵͳ����Ӧ��
��������ADASϵͳ�ļ���Ӧ��
�����Զ���ʻ�������й������������ٵ�����
����ADAS���Զ���ʻӦ�ù����������ٵİ�ȫ��ս
�������ѧϰ��ADAS���Զ���ʻ��Ӧ��
�������ѧϰ��Ƕ��ʽӦ��
�����ɿ��ԸߵĹ����ͳɱ���ADAS����
����ADAS���Զ���ʻ�ķ��濪������
�������ײ��״�IJ��Լ���
���������״���߾��ȵ�ͼ
����LTE V2X��չ����
����AEBϵͳ��ƿ��������δ��ƣ�
��������Һ���DZ������ܲ���ϵͳ�ļ���
�����˻��������
����REM��߾��ȶ�λ
���������λᵥλ
����
����
�����λ���ϵ��
��������λᡢ�ݽ�������������ϵ�λ���ϵ��
�����Ϻ�����־�� 187 0214 8304��ͬ�ţ�
�������������� 158 1002 7571��ͬ�ţ�
�����绰��021-64873381
�������䣺jerry.zhao@shujubang.com































����˵�������а�