Mark Cutkosky是美国两院院士、斯坦福大学机械工程教授与设计研究中心主任,主要研究机器人触觉和仿生机器人,是斯坦福大学最著名的机器人教授之一。 他是全球仿生机器人的奠基人。其中,他设计的壁虎脚机器人被美国时代周刊评选为2006年最佳发明。Mark教授切合第四届中国机器人峰会暨智能经济人才峰会“智能+时代,智胜未来”的主题,给我们带来关于Biomimetic Robot的演讲。
1
仿生机器人课
我们峰会的主题就是要理解下一代的机器人,特别是下一代的制造的机器人。我想说服大家的就是我们看一下下一代的机器人。机器人其实是超越工厂,将来会进入世界,进入到我们家里,进到我们车里的高科技产品。我们还可以学到更多的知识,可以从生理学当中学到很多,因为他们对这种不确定性,有很好的反映,特别是对周边确定环境。当然我们也可以从动物当中学到很多。我的实验室最好的毕业生就是研究壁虎机器人的,工业制造当中,做这种壁虎机器人不是很擅长,但是壁虎在其他领域来说可以大显身手,我们有很多地方在进行协作。
谈到仿生的机器人时候不是抄袭自然。 首先自己并不是最优化的,并不是一个工程。自然往往是选择什么是可以最好。所以我们其实从自然当中就是要挑出一些原则,原理。然后把这些原理原则进行改造,用在机器人身上,其实也不是100%仿造自然。
仿生:从生物上得到启发,从而进行设计。
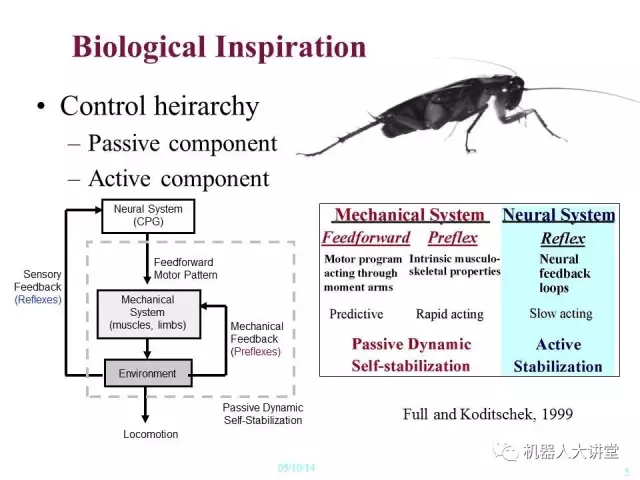
接下来介绍我们的仿生学的机器人或者生物灵感机器人,在自然当中这些动物或者这些有机体是非常复杂的,比如它的腿或者手臂非常复杂,他们有肌肉。 它能够简化所有的对复杂系统的控制,所以它们的行为习惯很简单。
所有的动物要能很好的管理能源,如果你不能够很好的控制能源的话,会被饿死。或者节约能源的能力很强。第三点就是用多功能的材料和有多个用途的材料, 这是对于制造业4.0我们要思考的。我们要在机器人当中使用一种新的不同的材料,例如前面讲了一个软的机器人,我们会使用新的材料,我们需要新的制造过程。还有最后,并不只是在环境当中生存,还要和环境进行互动的。我们没有哪个制造工艺可以达到这么精细,但是自然可以做到。因为自然开发了这样的生物体,他们一个细胞、一个细胞,然后每个细胞进行分裂造成的。对我们来说。我们需要一个制造物品达到这样的精细度,这是非常巨大的挑战。
2
快速成型技术
这是新兴的人工智能技术。其中有一个我们要记住,是在自然过程当中,智能绝对是没有和物理结构分割的,而是组合在一起的,例如机械昆虫,有很多传感器,神经系统可以进行响应、有控制系统。最低级的其实也是充分利用了物理结构的机械性能。这种智能和机械系统在自然当中不是分离的,而是集成在一起的。我们使用快速成型的技术。这是一个典型的工艺,当然还有其他工艺。无论是我们的制造4.0还是工业4.0, 都需要思考新的制造的过程,有不同的材料通过这样的工艺做到。
3
拥抱自然—仿生设计的历史进程
可以看到这是我们的机械一些智能还有我们控制的智能。我们现在达到什么地步呢?我们知道有不同的机器人。我们一开始这种机器人,能够飞来飞去,拍照片,或者是有轮子在下面,在地上爬来爬去,或者有超声传感器建立地图。但这不是互动性的,和环境没有互动,因为互动是有风险的。如果我们开始碰上环境的话,一定会遇上问题。可能有磨损或者是坏掉。这个就是非触碰机器人。
这是一开始,后来人们学到更多了,更加大胆了,从事如何将机器人引入世界。有一些机器人,他们是和环境有非常亲密的接触。他们的爬到墙上,在空气当中飞行。并不是不要碰到这个东西,他们其实故意栖息在这个墙上或者障碍物上了。我们想象一下这些小动物飞行的时候他们也会栖息,有的时候包括如何去进行一些比如抓捕的工作。当然每一次我们都会有非常多的仿真和建模的工作,希望能够和环境进行互动。所以我们现在做了好几次了,举例来说,第一页展示的蜥蜴机器人,这是做的它的关于黏性的仿真,,是仿生的机器人。我们开始是以这样一个挑战的开始的,后来我们观察了这个自然当中动物怎么进行墙山攀爬的。比如一个蜗牛,它当然可以爬在墙上,但是它不是非常的敏捷,而壁虎是非常快的。它可以每秒达到1米行动速度。所以这是一个很好的例子。
然后我们就会跟我们的生物学方面的专家进行沟通。从跨学科的角度向他们学习,接着我们再做出一些假设。哪些可能对爬行动物比较重要,对壁虎来讲是非常复杂的系统,所以我们必须进行简化,我们提出了一些设想。确定最重要的部分然后建模,最后再进行制造,生成柔性的机器人做这样的爬行的工作。当然了,我们有的时候,在第一次往往不一定能够做到最后,有的时候不好的话我们要不断的进行修整。所以现在我们的仿生机器人做了第三代了。
4
对动物攀爬的研究
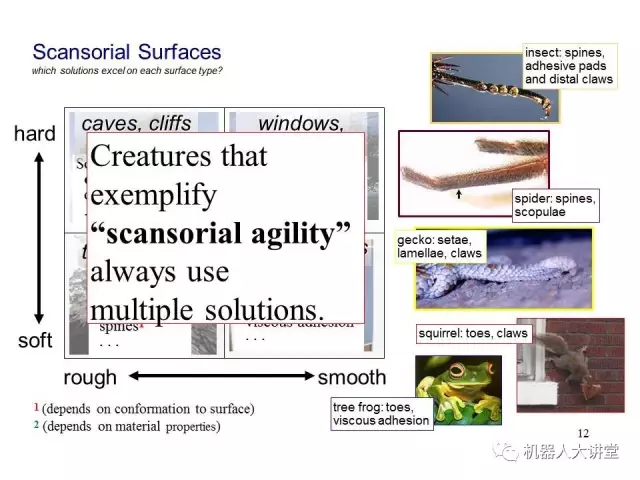
另外要考虑的,就是对动物爬行的观察,例如你想像爬山的动作,有不同的表面,你希望能够在上面进行攀爬,有的时候比较硬或者比较软。不管是壁虎,还是松鼠,在右下角大家看到有一个松鼠,从某个人的厨房里面爬出来的,嘴里面还有食物,它在向下攀爬。对动物来讲,不同的表面他们有不同的解决方案,这是非常有趣的。
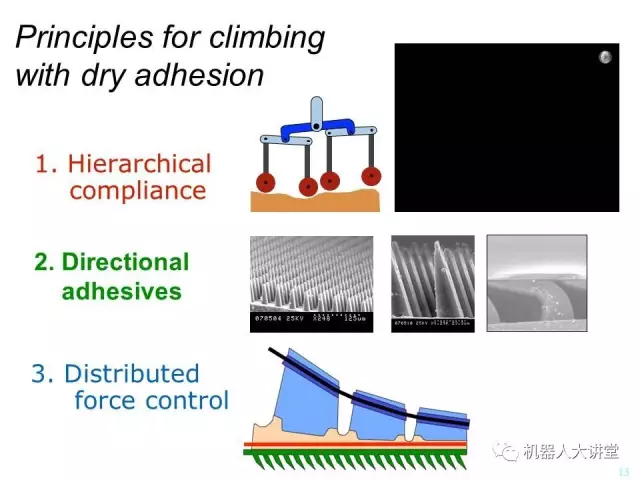
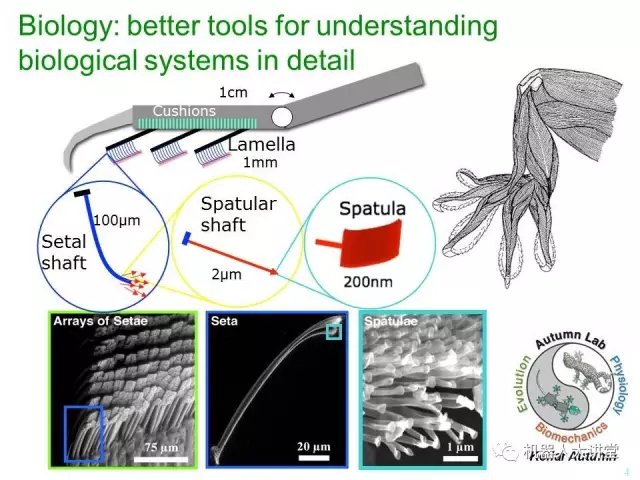
举个例子,如果观察一下壁虎,它是有一个足间有黏性的装置,还有爪子,这个爪子是可以用很好的和砖头或者硬质的砖头表面进行抓合,而且还有一些刺毛。这是我刚才所说的非常重要的一点。就是让我们考虑一下,对于他们来讲最重要的原则是什么,从壁虎角度来讲,我们可以观察到非常典型的一点,通过不同的沟通之后我们会觉得需要能够根据不同的尺度的表面进行一个契合,有一个层级的契合度。然后它可能在这个表面,有分子层面的契合度。
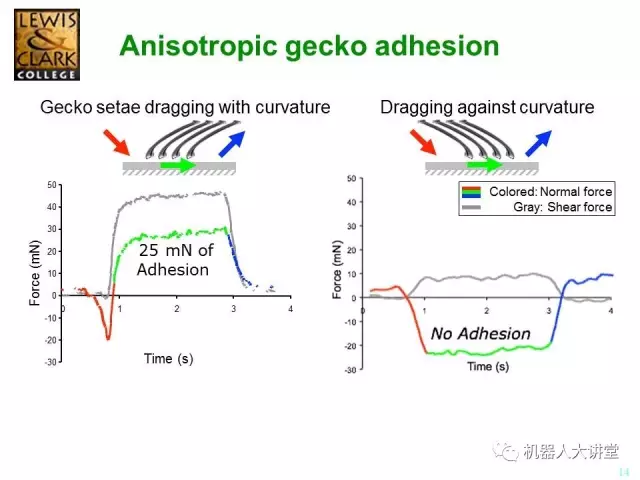
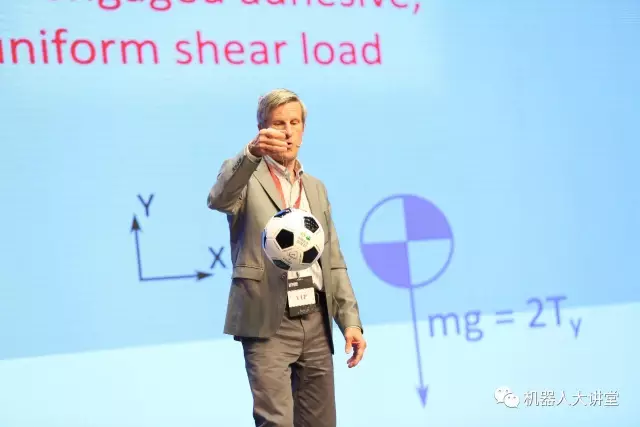
下面是讲到典型的胶黏剂的几页PPT,壁虎的胶黏剂有定型的,而且可以控制的,所以我们花了很多的时间构建了一个微级的结构。它可能有同样的定向的结构性的能力。在几分钟之后我会提到。当你确实有了这样的系统,能够跟不同尺寸的表面进行契合之后,这个时候需要有一个控制的战略,根据我们的机器人,可以释放的力量,有个分布力的控制。像壁虎的脚指头一样,可以以厘米的层级控制它的力量。我们在这里以微米的级别,以及纳米的级别也会实行不同级别上对力量的控制。我同事,他是生物学家,他帮我们进行数据的生成。从壁虎的视角进行了分析。在它的纵轴是黏附力大小,横轴是黏附的时间。对于定向的时间,对壁虎足间的黏附力有一个正向力。方向错误的话不会有太多的黏附力。像这样的材料,这个材料不像我们胶带一样一直是黏的,而是在想要它黏的时候才能够黏,这是我们想要的属性。
我们有壁虎的材料,看上去不黏。向它加载荷,如果有一个剪切力施加表面的话,它可以很轻松抓起一个足球,但是不是一个胶带。如果不加载剪切力一点都不黏。
5
力的控制
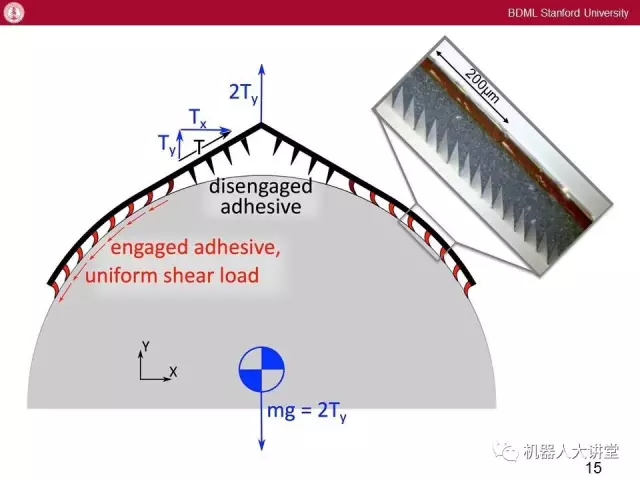
我们以更科学的角度解释一下:从纵轴来看有一个力,横轴是我们剪切力。这跟表面平行的,所以当我把材料向上推的时候,不会有任何的黏附的作用。看上去可能像摩擦力一样,摩擦力没有什么坏处,摩擦力可以让我们汽车的刹车起到作用。但是对于摩擦来讲好控制,只要通过控制施加压力的大小就可以控制了,可控就是这个因素。
对黏附力也如此,通常对一个切向力而言相反,如果有比较大的切向力能够向下拉的话,就会产生很大的黏附力。如果没有任何的切向力,轻轻碰一下,那么我黏附的效果比较小,这个时候会很快剥离开来。慢慢放下剪切力的时候就自己慢慢断开了。这是意味着我们有一个安全区,这个安全区让它黏附作用发挥效益,在这里还有几页PPT,涉及到如何控制的问题。
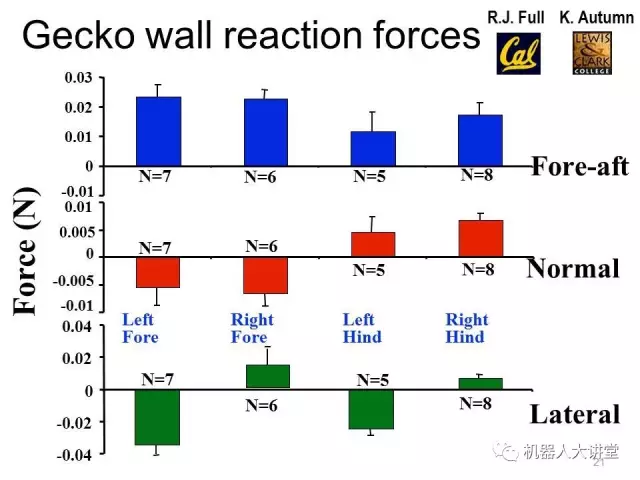
我们做爬行机器人的时候,它的前肢是比较好的,它们将会防止它会向后仰掉下去,所以最初出发点就是强化它的前肢,把前肢进行轻度的载荷,不让它失效。但是我们对于壁虎的机器人自身的作用率,会发现他的前肢,往往大部分的时候是失效的,因为他们处在安全区域,蓝色的腿比较安全一点,我们优化的策略就是你应该在这个上肢更用力一些,如果更用力的话就会产生更大的黏附力。
从上部分来讲,展示了它的前肢和它的前向和后侧向的用力情况,比如在左侧,左前和右前用力比后肢更有力一些,在正常方向来讲可以看到它的前腿更多的是控制它的身体不会向后仰。对后也是有一个推向,有一个向上的剪切力,壁虎用此力向自己身体靠拢,这样就有很好的吸附力。壁虎有时候爬在天花板上,必须要、能够左右地去收紧他的肢体,这样能够产生向上的拉力不会让它从上面掉下来。
对于摩擦力和吸附力,他们各自有什么好处呢?我们分别讨论一下。
摩擦力和吸附力可以进行比较,有多大摩擦力取决于重量多少,试想一下,大部分的昆虫,他们的重量非常轻,但是他们能够背负有很大的载荷在自己的身上,这个不是因为它的摩擦力大小,而在于它的吸附力多强。我们想象一下小型机器人,要让他们可以做一些有效工作,我们必须给很很好的吸附力,让他们可以进行载荷的承担而不是给摩擦力。吸附力跟区域的面积是能够相关的,而不是跟体积相关的。
和摩擦力一样,吸附力也需要控制。举个例子,你看一下蚂蚁怎么在线缆上爬行的,他们每一次在提起脚的时候先把脚脱离,然后再放上去,他们可以以非常快速的方式用一个可控的黏附力在电缆上走。如果你很小的话,你可能很好地应用这个吸附力,如果你无法控制这个吸附力你将会粘在电缆上。还有一个比较好例子就是人的吸附力,我们可以非常快速地控制这样的吸附力。
6
黏附力的应用
除此之外,壁虎黏附力还有什么应用呢?一个应用场景就是在太空。可能不仅仅只有美国,同时中国也有非常多关于太空探索的愿景。对于壁虎的吸附力而言,很好的应用就是在太空中进行吸附。在真空中不能用真空吸附,因为是太空中要么是很高的温度要么是很低的温度。大部分的材料,想抓的都不是雌磁性。但它在另外一个飞行轨道上的话,你就再也看不到他了。还有我们在航空站,空间站当中控制我们的物体。
另外一个应用就是在空间站之外,在太空当中抓捕某些物体,我们可以看到一些垃圾围绕地球,这个会越来越危险,我们必须搜集这些太空垃圾,放到一个安全轨道当中,不要影响我们未来的勘探工作。那么第一个应用就是清理轨道的飘浮物,但是这比较困难,因为它本身是不能抓捕的,而且还有一些自我旋转的方向。所以这个时候很难抓住固定。如果壁虎有这样的抓手,可以很快的抓住。
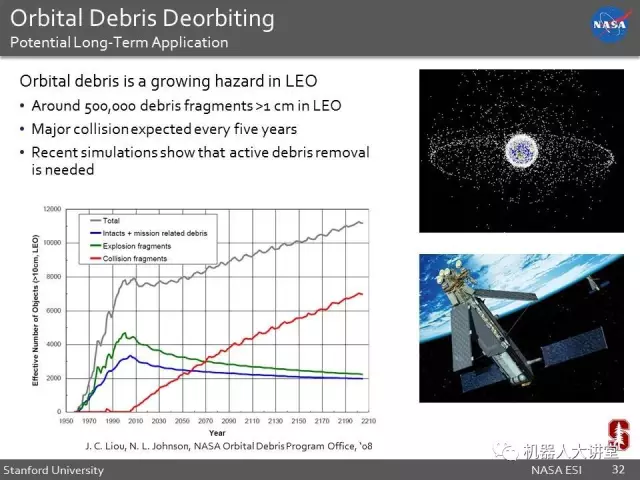
地球附近有非常多的垃圾,包括一些无用,退役卫星,他们将会造成很大的一些损伤。所以我们需要能够在0重力的环境之下进行清除。
对于壁虎的吸附力,我们有很好的应用就是把一些太阳能板或者其他的材料在真空的情况下进行抓附,清除垃圾,这是很好的应用场景。
我们进行了一些圆形的设计,就是这些不同的机器人。在美国航空实验他们也进行了实验,希望把400公斤的机器人和另外一个400公斤的机器人进行壁虎式的抓附,把另外一个机器人拖走,这个机器人很成功轻轻一碰就把另外一个机器人抓住了。同时不会太影响既定的非常轨迹,因为只是轻轻的一碰就可以吸附上。这是有不同的抓取表面,在0重力的实验室当中他们就进行了这样的实验,抓了一个小箱子,而没有对小箱子的既定飞行轨迹产生改变。这跟传统的情况有点不同。它的偶联和结偶是非常轻的,不需要有太大的外力,他们也进行了一些概念的验证。在这种情况下,对于物件的方向控制非常容易的。在今年早期的时候,他们在国际空间站做了一些实验,有的物件,有的原来在天空中飘来飘去。我们现在可以通过吸附装置粘在墙上。
还有一个例子给大家看一下,我们待会儿可以做一个总结。这是四旋翼的飞机,是无人机的例子。无人机有很多的应用,,比如说拍摄照片,或者是进行监控或者是绘图,飞行过程中,目前是不会碰上物体,我们觉得他们应当碰到物体,然后停下来再次起飞,这样确确实实能够节约大量的能量,如果把螺旋桨停下来可以节约很多的能量。这是自然当中的一个启迪。
工作图示:节省能量
原因:
接下来给大家看一下,它为什么要停在这个表面呢?它停下来,我们要考虑各种各样的大风情况,首先是一个小型的四旋翼的飞机,还有一些其他功能,就像一个昆虫一样,让它能够爬行。我们也会增加一些重量,也增加它的惯性,这样它增加了他的优势。很多的小型机器人一般也飞20-30分钟就没有能量。如果停下来的话可以停很长时间。
我们看一下,这可以把它的任务时间大大增加,省下很多的能量。当然这个结果还不是最优的。最低功率的螺旋桨,作用非常显而易见,如果停下来的话,能源消耗比飞行时候更少。还有另外一个,我们要找到很好的着陆点,一个墙上很好的着力点。在地面上我们很难找到很好停留的地方,这种墙更加安全一点。我们决定在垂直表面进行实验。如果在垂直表面停下来,我们要爬行重新的定位,得到更好的角度。如果下雨的话我们躲在屋檐下面,等一等或者充电再次起飞。
第三点,非常有意思,这一点,我在开始的时候并没有意识到。是我们要把爬行,还有四旋翼组合在一起。
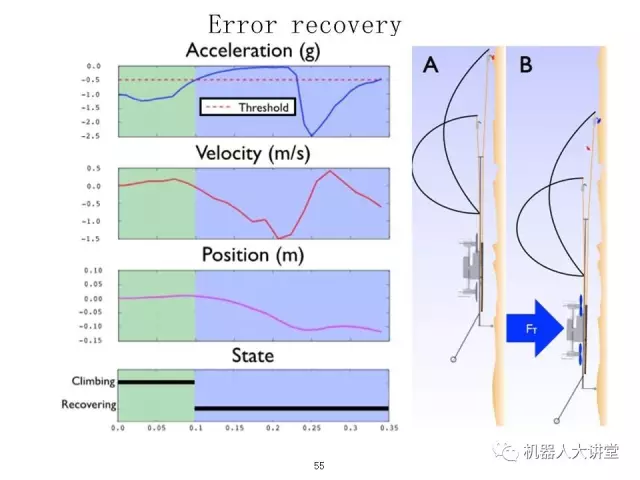
我们还可以更加的勇敢一点,爬上这个墙,如果爬失败的话也不是什么大事,我们可以再次爬。
这是我们生理学非常好的灵感,有一些鸟他们用翅膀帮助他们爬行,特别是在悬崖或者树上他们用翅膀攀爬。还有昆虫,有非常小的一个刺,这个小刺能够卡在粗糙的地方,这个非常小,我们可以计算一下。如果有一些小小的突起我们可以用小刺抠在上面,同时可以马上给出一个螺旋桨的推力。我们还有各种各样的参数的和一些简单的算法,这种智能的行为习惯,有的时候会来自于一个非常简单的一个控制器,用简单的系统和非常复杂的环境进行互动。
我们要从生物当中学到更多。用新的材料,需要一个崭新的制造工艺。记住,像我们的壁虎的这样的黏带,这是非常小的特征。今后我们制造的,怎么制造出这么小的黏胶带,这个是要好好思考的。我们需要有这样的机器人,需要有很好的空气动力学。
来源:中国机器人峰会
文章编辑:曾志