- shenzhenware-
「移动」向来是机器人研究的一个重要议题,因为要适应人类及动物生活环境中的复杂地形,机器人往往被设计成仿生的双足、四足式,不过也有另辟蹊径的设计方法,比如单腿弹跳式。
不管怎样,鉴于对周围环境及事物的常规认识,人们总觉得一般仿生机器人就应该是四足式或者双足站立式的,就像 波士顿动力
来自日本大阪大学(Osaka University)的研究人员 Yoichi Masuda 在打算研发一款新型的足式机器人时,从英国科幻小说『世界之战』中入侵地球的反派三脚机器人身上获得了灵感。他发现,三足的机器人设计具备行走和平衡方面优势。

▲ 『世界之战』中的三足机器人
另外,足式机器人的研究也使得 Masuda 产生了一个疑惑,那就是为什么包括人类在内的所有动物在经历多年的进化后却没有三足动物留存。而有趣的是,目前还有部分动物存在近似「用三条腿走路」的情况,例如袋鼠在直立行走的时候,会需要尾部点地来维持身体平衡。
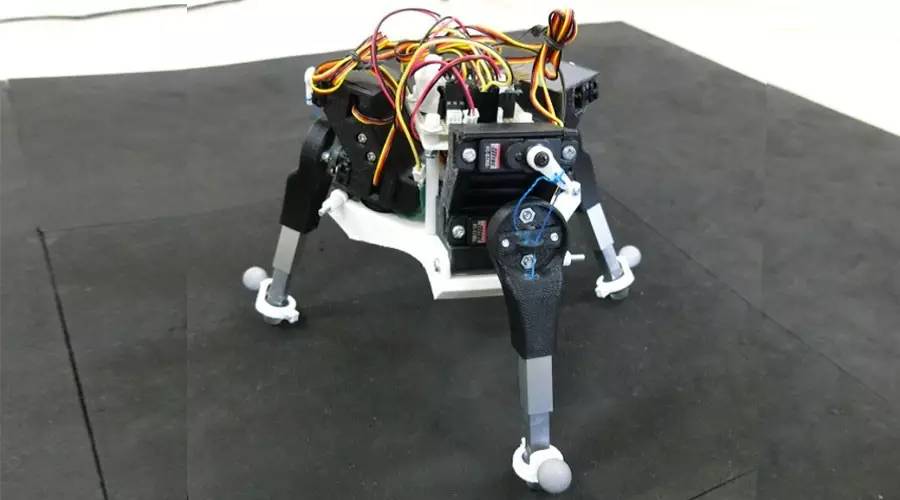
为研究动物行走、移动方式的演进过程,Masuda 与学校的同事共同研发了一款名为 Martian 的三足机器人。
不管是人类,还是四足的骆驼、狗,多足的螃蟹等,他们均有个共同特点——身体成对称性的构造。基于这点启发,Masuda 一开始就将 Martian 设计成三边对称的形式。
此外,三足之间如何协调工作以保持机器人的身体平衡成为了该项目研究的重点。早在十年前,创立了加州大学洛杉矶分校「机器人机械实验室」的 Dennis Hong 教授就曾经研发出了一款三足式的机器人——STriDER。
STriDER 是一款自激驱动式的机器人,拥有 12 个自由度。在对 STriDER 进行大量的步态测试后,该项目研究人员发现,STriDER 虽然能够走路,但它更像一个间歇性的双足机器人,也就是在大多数情况下主要驱动其中的两条腿来行进。

▲ Dennis Hong 教授率领团队研发出的三足机器人 STriDER
在这一点上,Masuda 对机器人做了一定的改造。他们在刊登的论文里特别提到,Martian 拥有三个高度兼容的模块,在任意一条腿不知道其他腿部运动状态的情况下,机器人都能在走直线或旋转的过程中保持平衡。
Martian 控制方案由相位振荡器和来自地面的反作用力反馈信息组成。其中,每条腿的控制是分离开来的。根据震荡器反馈的频率,机器人做出沿单一方向行走或旋转的动作。
事实上,这种分散式、无需对每一个步态进行编程的控制方式已经被应用到大部分的仿生机器人中,而 Masuda 团队则用事实证明,其同样适用于三足机器人。
Martian 项目由大阪大学机械工程教授 Masato Ishikawa 主导,在研究团队的努力下,他们已经开发出新版的三足机器人。相比 Martian,该新型机器人具备更复杂的动力系统以及更高的自由度,能更好的处理机器人的步态。
另外,该项目研究成员希望将研究进行下去,目的是为了再现动物步态演进的方式,找出「动物为什么不是三条腿」这一问题的答案。(主笔:Jes@深圳湾)■
● ●●