 )
)
������Ʒ����
����˵��
����������
����Ŀǰ��½���ƶ���������Ҫ���������˶���ʽ�����ֻ��Ĵ�ʽ�������������л��С��������ƶ������˶���һ����ͬ��ȱ�ݣ����Ǻ���һ����Խ���ϴ���ϰ�����������Ż����˵�Ӧ�÷�ΧԽ��Խ�㷺�������ٵĻ���ҲԽ��Խ���ӡ����Ӷ����ⲿ���λ�����Ҫ������˾߱���ǿ�������˶�������
������Ծ�˶�ʱ��Ȼ�縳�������һ����Ҫ�˶���ʽ�����ڽṹ��ǽṹ�������������������Ծ��ʽ�����ǹ�����������ʽԽ�ϣ���������Ծ�˶��ĵ�����Ӧ�Ժ�Ч�ԡ�
������Ծ�����˿���Խ������������ʮ���������ߴ���ϰ��ͬʱ������С����ŵ���ɢ���ܹ��dz���Ч��ͨ�����ӵ��Ρ�������Ծ�����˾����������������͵Ļ����˵Ķ����˶���ʽ���˶��ص㣬ʹ���ڿ���̽�⡢���վ��֡��Ǽ�̽����������ս��ս�������������Ź�����Ӧ��ǰ����
����һ����Ʒ����
����1.1��Ŀ�������
�������������̽�⡢����̽�졢�Ǽ�̽��������ӣ������˵Ļ��Χ�Ѵ�ԭ���Ķ�����ҵ�ͽṹ���Ĺ��������������������Ӧδ֪�ġ��ǽṹ���Ļ����ѳ�Ϊ������δ���ķ�չ���ƣ����Ҫ������˾��и��õ������˶���������������Ӧ����������Ķ�ܷ��յ����������õĹ�·�ṹ������ʽ��ǿ��Խ�����ܡ�
����Ŀǰ�Ļ�������ҪΪ��ʽ���Ĵ�ʽ������ʽ�����˺��������л����˵ȡ�������ʽ���Ĵ�ʽ�ƶ��������ڷǽṹ���ĵ�����Խ���������ޣ�������������Ż������ɶȵ�����͵����Ŀ�����ӣ������˵�ʧЧ�ʺͿ���ϵͳ�ĸ��ӳ̶�Ҳ��֮���ӣ��������л����˵�Խ��������ǿ��������������������ʹ�������������½��������ܷ������Ȼ������Ӱ�졣��ˣ���Ҫ�о����õ��˶���ʽ����������ڷǽṹ���ĵ����ϵ�Խ�����ܺ����������ʡ���Ծ�����˾��н�ǿ��Խ�����ܣ�����Խ���൱�������߶ȼ������ϰ��������������ȵ������Ļ����й����������Ƹ�Ϊ���ԡ�
����1.2�������о���״
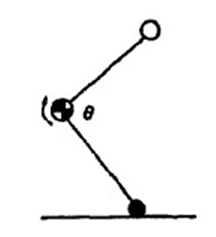
����1986��������ʡ����ѧԺ���ͻ�����ʵ���ҵ�Raibert��������������ϵ�һ������Ծ��ʽ�˶��ĵ��Ȼ����ˣ���ͼ1��ʾ���õ��Ȼ����˵��˶���������һ��ƽ���ڣ��Ȳ�װ�����ף������൱�ڵ��ɣ����ڵ����ϵ��˶�������һ�������ɵĵ����ڡ��ܶ�ѧ��Ҳ�Ӹ����Ƕȶ����ƻ�����������ѧ��ģ�����������˺��ֵĸ��ֵ��Ȼ����˴�����������ƵĽṹ��
������һ�ֽ���ĵ��������˻���ģ��ΪAcrobatic Robot��Ҳ��Acrobot�����Ľṹ�����ڵ�ת��˫�Ӱڣ���ͼ2��ʾ���û�������һ����ת���ɶȺ�һ������Դ��λ����ؽڴ�������������ͨ������������ʹ��ײ���ȥ�����ĽӴ���ʵ�ֵġ�
����
����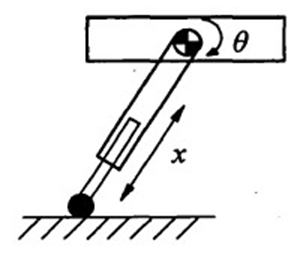
����ͼ1 Raibert�������� ͼ2 Aerobot��������
����21���ͳ�NASA�����ƽ�ʵ���ҿ�ʼ�������͵���Ծ���������ڻ��ǵ�̽����������������Ͳ��ϸ����������о�����������ͬ��������Ծʽ�����ˣ���ͼ3��ʾ����һ����������Ծ�����ˣ����Ե����ɵ���������ݸ�ѹ������һ���̶�ʱ���ض��Ļ�������ʵ�������洢��˲���ͷ�ʵ����Ծ����ֱ��Ծ�߶�Ϊ80cm��ˮƽ��Ծ�����30-60cm��ˮƽ��Ծ�����30-60cm�����Ǵ���Ч�ʽϵͣ���е�ܵ�ת��Ч��ֻ��20���������������һ���ϵͳ�����������������������ȱ�㣻�ڶ�������������Ծ�����ˣ����ܲ��������˻�������ˮƽ����ĵ�����������ת��Ϊ���巽��ķ�����������ѹ�����Դ�Ƕ��ʽ����ϵͳ������������������ഫ�������ڲɼ������Ϣ����Ӧ��������ʽ�����ҷ�����е�ṹ����ÿ����½�Ժ������з���Ϊ��һ����Ծ�����������Ծ�߶�Ϊ1.8m���ڻ�����Ԥ�ƿɴ�5-6m�������Ƕ�Ϊ50°��������1.3kg��ˮƽ��Ծ����Ϊ2.3-3m����ֱ��Ծ�߶�Ϊ1.2m�������Ч�ʣ���е�ܵ�ת��Ч����ߵ�70������������Ȼ�������Dz��ɵ��ڡ������Բ����ȱ�㣻����������ʽ�ṹ����Ծ�˶��ɳ������µ��������ӵ��ĸ˻������������ִӶ�������ȶ��ԣ���1kg����ֱ��Ծ�߶�Ϊ1.1m���䱸�˵����豸�������䣬������ɱ�̿������ȣ�ͬʱ����Զ�̿��������п��ƣ�ʵ���������Ƕ�0-80°�����ɵ���
����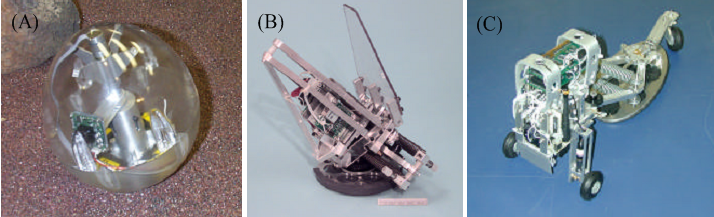
����ͼ3 NASA��������Ծʽ������
����2002�꣬�ձ���Hvon����������ܹ���Ծ�ĵ�������ˣ�ģ�¹��ĺ��ȣ�����������Ϊ�����˵���Ծ�ȣ���������Һѹ����Ϊ�������⣬����һ��������Ϊ���졣ͨ�������ṩ�ƶ���ʵ����Ծ�������ü�����Ϊ��غ�Ļ���װ�á����ڻ������ɶȽ϶࣬Ϊ��ʵ�ֻ����˵ľ�̬�ȶ��ԣ��ڻ����˵Ķ���������������װ�ñ��ֻ����ľ�̬�ȶ���ʵ��������û�������һ�����ܲ�����Ծ���ܡ�
�����ڹ��ڣ��������������˵��о��������Σ�������һ������о�������Ҫ�������˶�ѧ������ѧ���ٶȺ����Ĵ��������Լ������йط������������˵��˶����ܷ�����о���������ҵ��ѧ�ĸ��Ľܿ��������������Ծ�����˷�����о�ȡ����һЩ��չ���ÿ�������Ƶ���Ծ�����˲��÷ǶԳ�ʽ�������˻�����Ϊ��Ծ�ȣ�ͨ��˿�ܴ������쵯�ɡ��û�����������Ϊ620 g����Ծ�߶�Ϊ30-45 cm�����ÿ���������������˽��иĽ������ó�����˻�����Ϊ��Ծ�Ȳ���������������̬����װ�ã��û�����Ծ�߶�Ϊ20cm��
����������Ҫ�о�����
������Ծ�˶������Ļ������ǻ�ȡ����������Ծ�����е��˶��������������Ҫȷ�����Ƿ��������ѡȡ�����ڶ���Ծ�����У����������Խ����Ծ���ܣ���������ȼ��ƶ�����ȣ�����ļ������˶������б��ֳ���ǿ�ĵ������������ȳ������������Ծ���ܣ�����Ծ�ȵ��켡�����������ϵͳ�ܹ�ʵ�����Ⱥ���Ծ�Ȳ�ͬ�Ļ�е�˶����ڻȳ����Ծ�����У�ͨ���ͷŰ��°��е�����������Ծ�Ȳ�ǻ�ڿ������ţ�ʹ�ȳ�������һ�����������Ӷ�ʹ�ȳ�Ѹ���뿪���棬��������������ٶȡ�
����2.1�ȳ��Ȳ��ṹ����
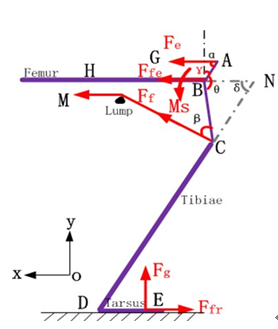
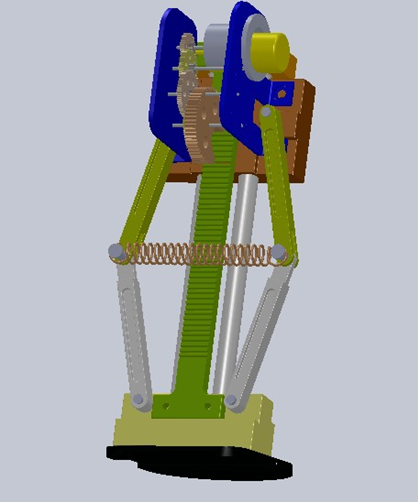
�����ȳ���ⲿ��һ��ǣ���������ǵ��ڲ���������Ҫ�ļ���һ�����ֽ��켡�⣬�������ȵ��쿪����һ������������ʹ������ͼ 4 ��ʾ��
����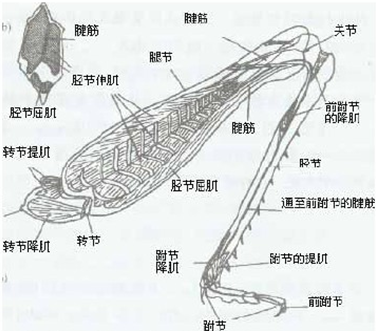
����ͼ4 �ȳ��Ȳ��ṹͼ
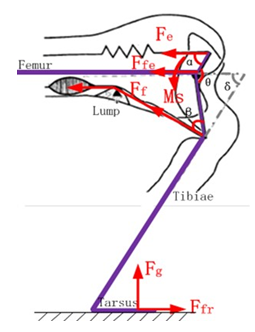
�����ȳ��Ȳ�����ͼ�����пɿ������Ƚ����ֽ�����������һ������ת����ʹ�ֽ����Ƚ���ֱ�����ۣ��Ƚ������кܶ�б�ŵļ��⣬�����ֽڵ��˶�������һ�˸����Ƚڵ����Ƥ�ϣ���һ�˸������Ƚ���һ�����Ľṹ�ϣ����ͨ�������Ƚ����ֽڵĹؽڵ����ֽں��ڡ���Щ��������ʱ������������ʹ�ֽ����Ƚ������ֱ����ʱ���Բ����൱��������ɼ��ȳ浯���Ĺؼ�������Щб�ŵļ��⣬��Щ�����ƶ����ڹؽ��ϵ��죬�����ͨ��ȥ���Ȳ��ؽ�һ��ı�Ƥ���������첢����ֱ��ʽ���������������Ȳ���һ�ڿ��������һ�鼡�������ͨ���콫�ֽ�����һ��������һ�鹤��ʱ����ʹ�ֽ�����һ�������˶������ڻȳ��Ȳ��ĸ˼��ṹģ�͵Ĺ�����ͼ5��ʾ��
����
����
������a�� ��b��
����ͼ5 �ȳ��Ȳ��ṹ�˼��ṹģ��
�������ݻȳ�����Ծ��������Ծ�������ĽӴ����������Ծ�˶�ȫ���ڿɷ�Ϊ���Ρ������Ρ��ڿսΡ���½��:
����(1)���Σ��ȳ���Ծ���Ƚ��ƻ���ת����ǻ�����Ƚ�ת����ʹǻ������汣��һ�����ʵļнǣ��������������ƣ�ʹ������Ծ����������������߶Գƣ���ʹ��Ծ���켡�������������������洢����°��С��ڴ˹����У��ȳ��ǰ�Ƚ������Ƶ������Ի��һ�������������Ƕȣ���������Ծ���������������������߶Գơ�
����(2)�����Σ��ڴ˹����У��ȳ���Ծ����Ƚ���ǻ�ڿ���Э���˶���ʹǰ�������뿪���棬�ҹؽ�ת��������Ծ�����չ�仯���洢������Ѹ���ͷţ��Ӷ�ʹ���ýϴ�������ٶȡ�
����(3)�ڿսΣ��ȳ���Ծ���������Լ���뿪���棬��ijһ�����ٶȵ����ȥ�����������˶����ڴ˹����У��ȳ�չ��������������������������з��С�
����(4)��ؽΣ��������������£��ȳ�������ص��档
����2.2������Ծ�����˽ṹ���
����������˶���������ģ�������˶��ص㣬�ڷ������˶������Ļ����Ͻ��л�е�ṹ����ƣ�ʹ��������������ģ�¶������Ƶ��˶��������������ԡ��ȳ���Ծ�˶���Ϊһ�ֶ��ص��˶���ʽ�������������˶��������»ȳ���Ծ��������ƾ���ģ�������������е��˶��ص㣬ʹ������Ծ����������ȳ����Ƶ��˶��������������ԣ��Ӷ�ʹ����Ƶķ�����Ծ����������õ���Ծ���ܡ�
����2.2.1��ʽ�ṹģ�ͽ���
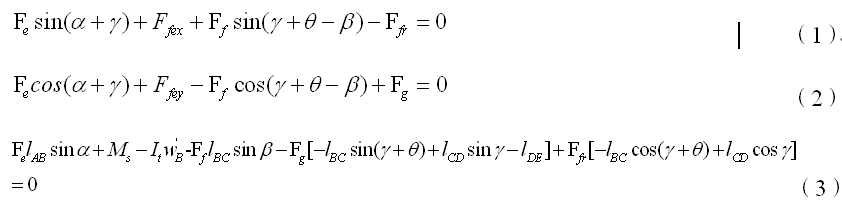
������ͼ5�ṹģ�ͽ��������������г�ƽ�ⷽ�̣�
����
���������ĵ�������ģ�ͣ���ͼ6��ʾ��
����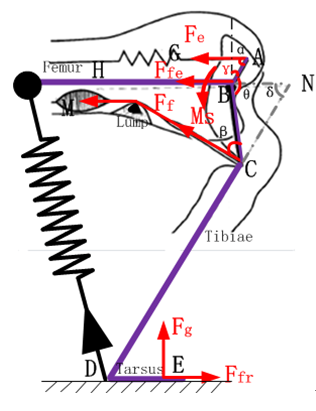
����ͼ6 ��������ģ��
�����������м����˴��ܻ������Ȳ�������ӵ���̶���ָ�����ģ������ɱ�ѹ�����������������ڵ����У�Ϊʵ����Ծ�춨�˻�����
����2.2.2 �������������
����(1)����װ��
������������ת��ԭ����Կ�����Ҫ���ýϴ�������ٶȣ��������Ƚ�һ���������洢�����������˷�һ����������������Ծ��������װ���������õ�ԭ��Ϊ������������������������Ϊ����������������Խ�࣬�����ܶ�Խ�͡�Ϊ���ܹ��洢�㹻������������������ת�أ�������ֱ������ͼ�����ķ�ʽ��ϳ����������л��������������Ӷ�ʵ�ִ洢������
����(2)�����洢����
���������洢��ʽ�кܶ��֣��絯�ɡ�����������ȼ�������ȡ����У�����������ȼ�������������ڻ����˵�С�ͻ�����˿��ǵ������˵ijߴ缰���ӳ̶ȣ����õ�����Ϊ�����洢������
����(3)��������
����Ϊ���ܹ��ͷŵ������洢������������ƴ������������ڸû��������õ������������Ե���������ֳ����������л��������˶������ڴˣ������һ�����ֻ���ȱ�ݳ�����ϳ��������ķ�ʽǡ���ܹ���ɻ��������������ͷţ���˴�����������ȱ�ݳ�����ɡ�
����(4 )�������
��������Ծ������������У�Ϊ�˼�С��������ߴ������������֤������������Ҫ����ֱ�������ϼ���ϵͳʵ���������ܣ����������������ڶ��������ϣ�������ڵ�������ˣ�����������е�ĩ��������ó������ϣ�ʵ�ֶ������ݣ�����Ծ�㽫����������Ű����ӣ������ɲ��������˹ؽ����ˣ���ͼ7��ʾ�����м��������һ�����������������֣�����һ����������һ���������ϣ���һ������Ϊȱ�ݳ��֣�����������ϡ���ȱ�ݳ������������������ʱ���������������ص��������˶�����������Ծ��ת�������쵯��ʵ�������洢�����������쵽һ���̶�ʱ��ȱ�ݳ�����������ڷ�������ʱ���ڵ������������£��ܹ����������ص��쵯�䡣
����
����ͼ7 �����е�ṹʾ��ͼ
����2.2.3 ��Ծ���̷���
������������Ƶ�������ʽ�ʹ��������Ƿ���У�������Ծ������������������ģ�ͽ����˶�����������ýṹ�Ŀ����Խ�����֤������ƽ��Ϊ:
����(1)���ֲ���ģ��Ϊ0.5�Ľ����߳��֣�����ΪPOM�����нϸߵ�ǿ�Ⱥ���ĥ�ԡ�
����(2)�������ĩ��ȱ�ݳ���Ϊ54�ݣ�������Ϊ40�ݣ����������Ͻν��������洢��ת����������ʱ����ͷţ����ÿ����һ�Σ��ܹ����һ����Ծ��
����(3)��Ծ���ĸ����˳ߴ��Ϊ60 mm������ΪA16061���ܹ���֤ǿ�ȵ�ǰ���¼���������
����(4)���ɸնȵĹ�ϵ226.5 N/m�������������Ϊ36N��
����(5)���ֺͳ�����ýӴ�Լ��������ȱ�ݳ������������������ʱ������������ֳ��������������ڷ�������ʱ�����ֳ����ܹ��Զ��������ϣ����ܳ��ֳ����˶�����Ӱ�졣
����������˶�������ͼ8��ʾ���������洢�Σ�ֱ����������������еij���ת������ʱȱ�ݳ���������������������Ӷ��������������ص��������˶�����������Ծ��ת�������쵯��ʵ�������洢�����������쵽һ���̶�ʱ��ȱ�ݳ�����������ڷ�����������ʱ���ڵ������������£����������ص��쵯�䣬�Ӷ�ʵ����Ծ��
����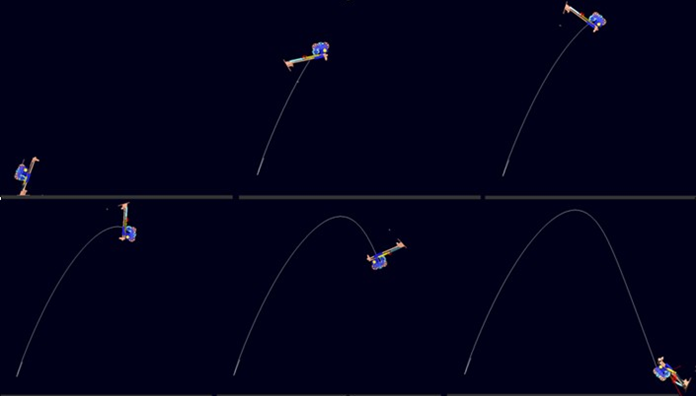
����ͼ8 ������Ծ����
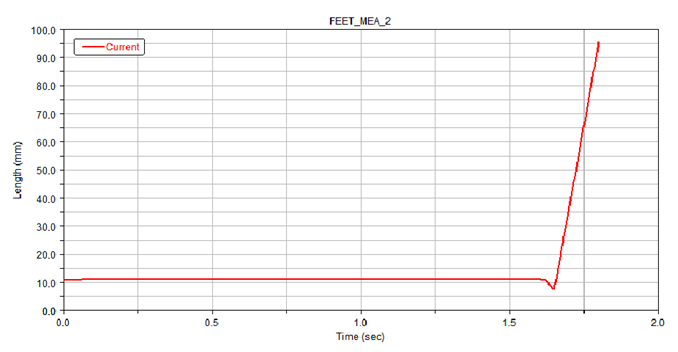
�����Ի����˵���Ϊ���㣬���������ٶ�-ʱ�䣬���ٶ�-ʱ�䣬 X�������-ʱ�䣬Y�������-ʱ�����ߣ���ͼ��ʾ��
����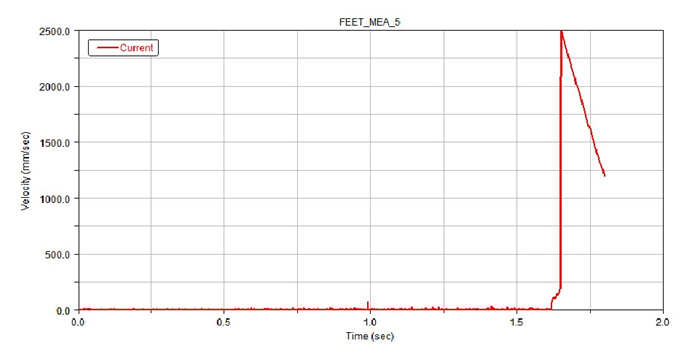
����ͼ9 ��Ծ�����˷����ٶ�-ʱ������
����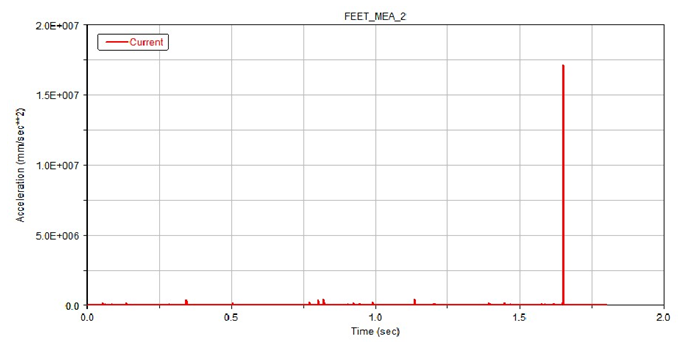
����ͼ10 ��Ծ�����˷�����ٶ�-ʱ������
����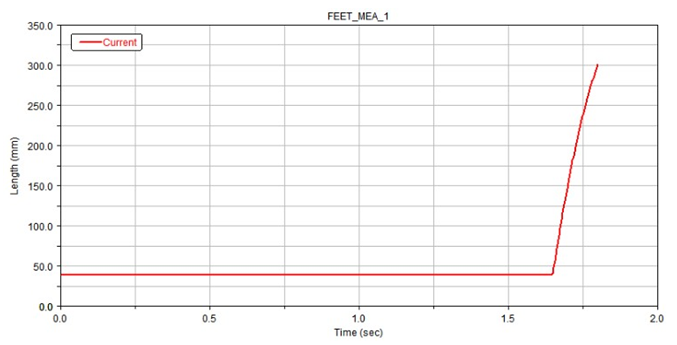
����ͼ11 ��Ծ�߶�-ʱ������
����
����ͼ12 ��Ծ����-ʱ������
��������ͼ9��10��11��12���Կ������������ܹ���˲��ʱ�ų������Ѵ����ڵ����ڵ���������������һ���ܴ�ļ��ٶȣ�ʹ���ܹ��ں̵ܶ�ʱ������Լ2.5m/sec���ٶȣ��Ӷ�����������̡���ͼ11���Կ�������Ծ�ĸ߶�����������¿��ԴﵽԼ30cm���������߶ȣ�140mm�����������ң����DZȽ�����ġ�
��������Ծ�����˵�ADAMS�����п��Կ����������˿���ͨ������ƵĴ��ܡ������Ƚṹ�����Ծ������Խ��һ���߶ȵ��ϰ��
����2.2.4 ���е���ģ��
��������㵹�IJ��ȶ���������Լ��ǰ��Ծ�����˷�չ����Ҫ���⣬���Խ����Ծ�˶��ȶ��Ծͳ�Ϊ�˹ؼ�����֮һ��Ҫ�������ȶ������⣬���˱�֤�����˽�������淢��������ײ�⣬����Ҫ���ڿսζԻ����˿�����̬���е�������֤�������Խ�����̬��ء�
��������һ��ͨ���ؽڰѻ�������Ծ����������һ��ͨ�����ƹؽڴ��ĵ����ʵ�ֹؽڵ�Ԥ����������������̬�ȶ���
������Ի����˿��з��й��̿��ܳ��ֵIJ��ȶ������Ǽ�����е���ģ�顣����ʵʱ��ػ����˵���̬��Ϣ�����ÿ����㷨��ʹ�䱣����̬�ȶ��Ϳɿء�
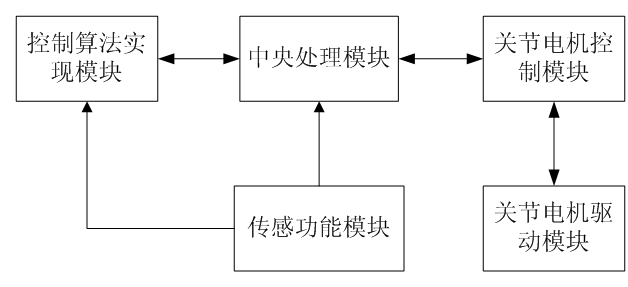
�������е���ģ����������¹���ģ�飺
������1�� �˶�����ģ�飺�����ؽڴ��ĵ���˶���ʵ��λ�û����ٶȻ����������ľ�ȷ���ƣ�
������2�� ���й���ģ�飺ʵ�ֹؽڴ�����������Ϣ�ɼ������ڼ��ؽ�ת�ǡ�ת�١��������λ�õ���Ϣ��
������3�� ���ƹ���ģ�飺�ܹ�ִ���趨�Ŀ����㷨���ۺϴ��������ϸ��������ź����γɷ����źţ�ʵ�ַ��й����е����ܻ���
�����������ź���Ҫ�����²�����ɣ��ؽڴ���λ�����ڼ��ؽ�ת����ȷ���ؽڵ�λ�ã��ؽ�ת���ɹ���������ã�˫����Ǵ��������ڼ������˸��˵���̬��������ģ������ϵ����ͼ��ʾ��
����
������������ͷ��������������Ҫʵ�ֹ켣���ƣ�
�����ɶ���װ�á�120������ͷ�������綯���������������̬λ�ô�������ɡ�����Ծ�����в�����ط��й����д���������ͨ���Ե�ǰ������Ϣ�Ĵ��������������㷨���õ������Ľ���ȿ��������������ƻ����˵Ŀ�����̬�켣��
����2.3�г�ǰ������
����2.3.1 ����Ŀ��
�����ڿͻ���ϵ�ϣ�����Ŀǰ��δ�������㹻��Ʒ��ЧӦ����ǰ�����Ƴɱ��ϸߣ���Ʒ��һ������ڶ����ڣ���Ʒ��Ӫ��Ŀ���ǽ����������ȶ���Ӫ����ϵ���������Ʊ����������ص�ͻ��������Ի�ÿͻ����Ͽɣ������ȶ��ĺ�����ϵ��ͨ���ص�ͻ�������ҵ�ڵ�Ӱ������������Ʒ�ļ������Ƽ�Ʒ�Ƽ�ֵ���䵽����ҵ�ڵ�����ͬ������ҵ���Ӷ������µĿͻ���
������Ȼ��Ծ���������ڶ������ھ����Ź�����Ӧ��ǰ����������Ծ�����˲�Ʒ������һ���ڼ�����ʮ�������ң��Ҹ����ɱ�ƫ�ߣ����Զ����ڣ�����Ʒ�ڿͻ�ѡ���ϣ������������/�������й��һ�ط�����֧�ֵ���ҵ�ƹ㡣
������Ӫ�������ϣ���Ҫά��һ���ļ۸�ˮƽ����֤��Ʒ���нϸߵ������ʣ����ǿ���ͨ�������������Ϳͻ���ʵ�ʹ���ɱ���
����2.3.2 �г���Ŀ��
�������к��ڣ�����Ʒ��ͨ��ǰ�ڷ���ЧӦ�������ɸ���ҵ�ڵõ�һ���̶ȵ��ƹ㣬�ʽ�;���Ҳ�õ����ۣ��ڴ˻����ϣ���ƷӪ��Ŀ�꽫�������ҵ������ת�䣬��ϸ���г���
����������Σ�Ӫ��Ŀ�꽫���ݲ�ͬ��ҵ���С��߶���Ծ�����˻���Ծ���������������������֣����У��Ը������ʵ��г���������������ҵ�г����Ա����ص�ͻ��IJ��ԣ����Ծ�����Ϊ���ҡ������ʽϵ͵��г����������Ʒͨ�û�������������ɣ��гɹ̻��IJ�Ʒ�ߣ����ڼ۸�����������Ʒ������ȷ�����֣������γ��Ա�����Ʒ��Ϊ�ʽ������ϣ��Ը��������г���Ʒ��Ϊ�������Ӫ��Ŀ�ꡣ
��������SWOT����
����3.1 ����S
������1��618�����˲��Ŷӣ�618�����˲Ŷ���ǿ���й�������ǿ����������ḻ��
������2��Ʒ�����ƣ��к���ҵ�����Ӵ�Ŀͻ�Ⱥ�����õĿڱ������²�Ʒ�ƹ㷽���м������ơ�
������3��������֤��618������������Ŀ�����Ծ�Ʒ��������ӹ��Ͼ��и��������߾��ȡ��߿ɿ��Եľ����ƣ��ܹ��ܺõ����������Ծ�����˵ĸ��������
����3.2 ����W
������1�����г�Ӫ�����Ʒ�ƹ㷽��ȱ�����顣
������2��������Ƚ�ˮƽ�Ծɴ���һ����࣬���γɼ���¢�ϡ�
����3.3 ����O
������1����չǰ��������ͨ��װ�䴫����������ͷ����Ԯ���ʡ��������豸����Ծ������/������Ծ���ܵ��ƶ�װ���ڿ���̽�⡢���վ��֡��Ǽ�̽����������ս��ս�������������Ź�����Ӧ��ǰ����
������2���ڹ����г�����ز�Ʒ���٣�����û�о������֡�
����3.4 ��вT
������1�����ڸ����Ʒ��Ŀǰ��û�б���������߳���˽⣬����Ԥ������Ⱥ��������
������2����Ʒ���г���������㷺����ν�����ѧ��Ч���ۺ������ϵ������һ�����⡣






























����˵�������а�