 )
)
������ ͼɭ�����ϻ��ˡ��о�Ա
��������10�£�����֮�������й��˹����ܹ�˾�ڱ�����ؾٰ��˼����������ͼɭ�����ϻ��ˡ��о�Ա������������10��12���ڻ���֮�ı����UCLAվ�ݽ�������Ϊ�ݽ��ټǣ����ҷ�����
������Һã���������ʹ�������Զ���ʻ�ķ�չ���̺ؼ��������Լ�ͼɭ��˾���Զ���ʻ����������һЩ������
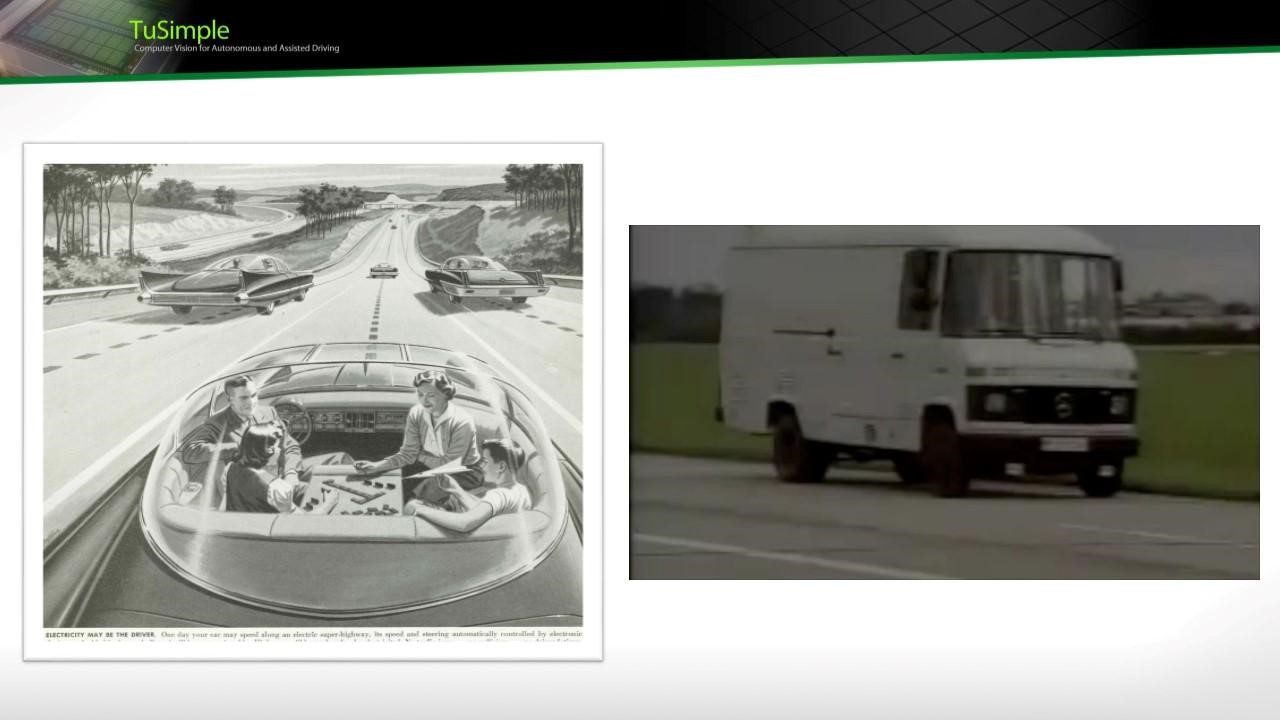
���������Ȼع�һ����ʷ���������ͼ��ͨ�ù�˾��70����50�������δ�����з�ʽ��һ�����롣��������У�δ��������ֻ��Ҫ���ڳ�������齫�͵�����Ŀ�ĵء��ұ������Ƶ��80�����ʼ�����۶����Զ���ʻ��һ����ؼ������з�����Ȼ������dz��ϣ���ʵ�ֵĹ����Ѿ������ǽ�����Զ���ʻ�dz����ƣ�����ʵ���Զ�Ѳ������ȫ����ȳ����Զ���ʻ���������·��Ĺؼ����ڣ�������һЩ����·���Ͻ��еġ��Ƚ϶�;�ġ������ȽϼIJ��ԡ�
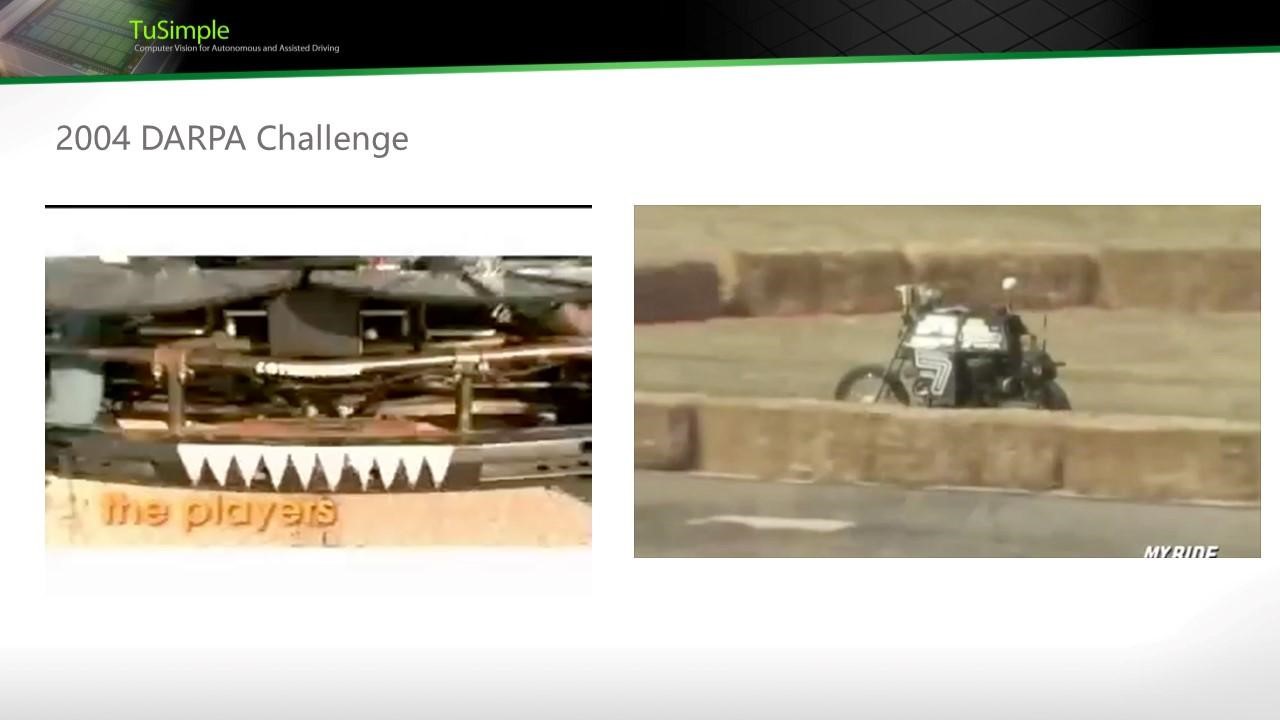
�����ᵽ�Զ���ʻ������Ҫ�ᵽ��һ����̱�ʽ���¼��������2004����������������е�DARPA Grand Challenge�����������Ŀ���ǴӼ��ݵ�ɳĮһֱ�����ڻ����ݵ�ɳĮ��ȫ��150Ӣ���·��ʵ����ȫ���Զ���ʻ����Ϊ�������ԶԶ�����ڿ�ѧ����ʵ���������ij����ļ�ʻʵ�飬�����dz������ѡ�
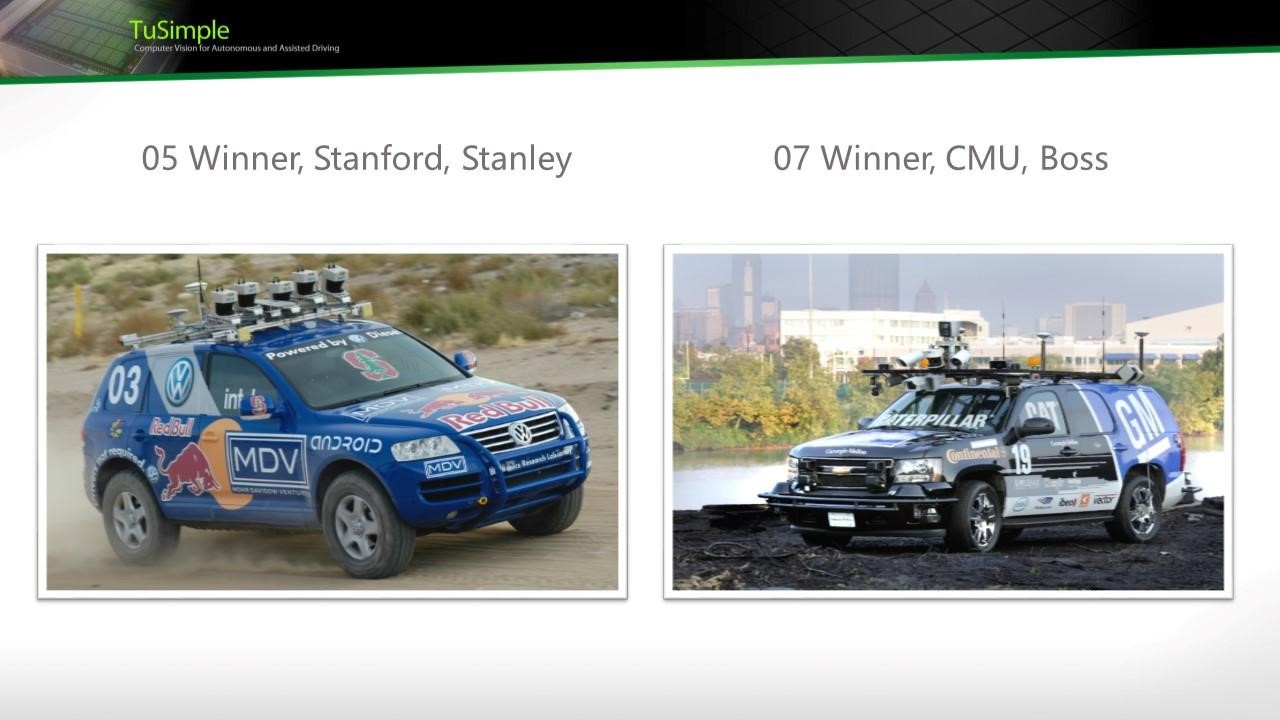
�����ڵ�һ�α�����ʮ��������У�û��һ�Ҷ���������������������Զ��CMU(���ڻ�÷¡��ѧ)�Ķ���Ҳ������7Ӣ���Ϊ��α�����ʧ�ܣ������������־�����һ����ͬ�ı�������2005��ı�����һ����7��������������������Stanford(˹̹����ѧ)�õ��˵�һ����Ϊ04-05��ı�������ɳĮ�н��е��Զ���ʻ���ԣ���2007�����������������˱��������⣬�������µı�����DARPA Urban Challenge����һ������һ���վ�����������С����Գ�������Ҫ���ֲ��ֵĽ�ͨ����������������棬CMU�Ķ����õ��˵�һ��
����Ϊʲô˵��DARPA Challenge���Զ���ʻ��������Ҫ����̱����¼��أ���Ϊ����һ�����У����ͨ��ʵ���ͱȽϣ��춨��֮���Զ���ʻ�����Ļ�ʯ�������Ժ��Զ���ʻ��ʼ�ձ�ʹ��SLAM�ļ���ʵ��ʵʱ�ĵ�ͼ���ƣ����Lidar(�����״�)���ж�λ��֪��
����07���������֮������������˵���Ǿ����Զ���ʻ��������Ѿ�����ˣ����ȥ�����Զ���ʻ���������û��ɡ�����Google��09�������Google[x]ʵ���ң���˹̹����CMU�Զ���ʻ�Ŷ��ټ���������ͬ�����Զ���ʻ������
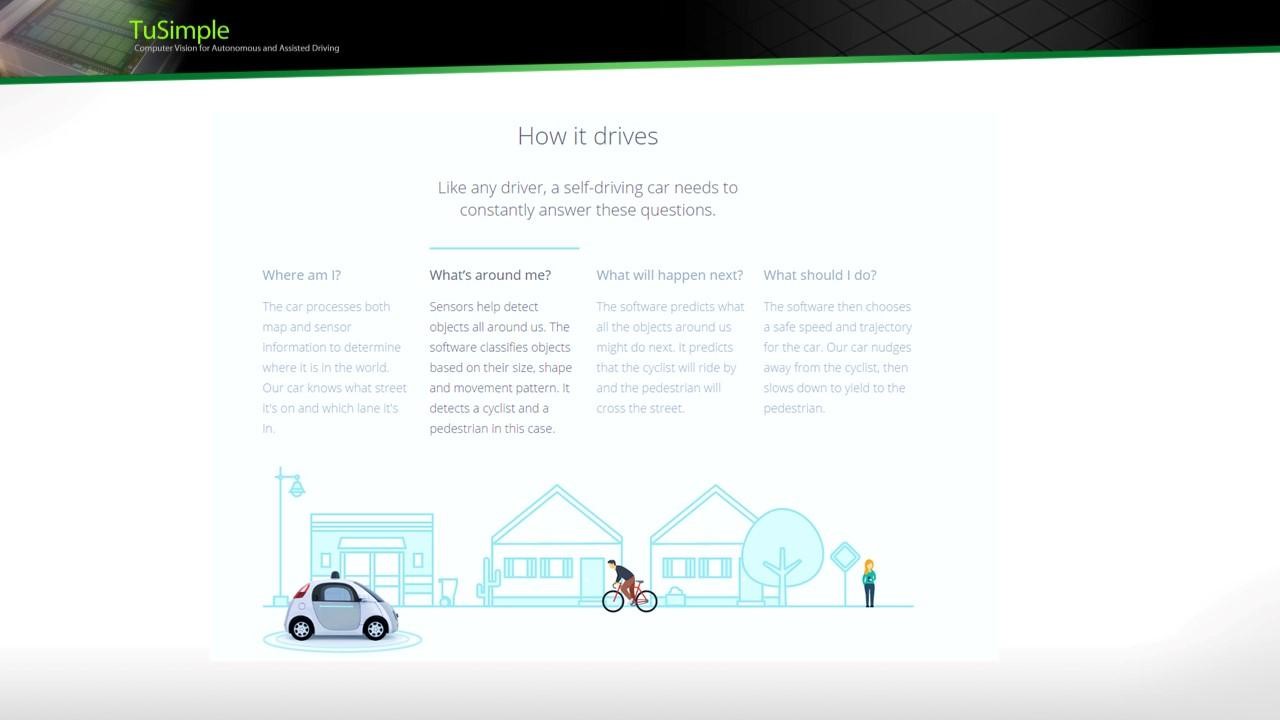
����Google�ļ���������Ҫ����Stanford��CMU���������ķ�������Ҫ��Ϊ�ĸ����衣��һ, ʹ��SLAM�����Լ�ʻ����������ǰ�ĵ�ͼ���ơ������Զ���ʻʱ�����ߵ�ͼ����ƥ�䣬����Զ���ʻ�����ľ���λ��Ϣ���ڶ���ʹ��Lidar������Χ�����ĸ�֪������֪��Χ��ʲô���壬�Լ����ǵľ������ꡣ������Ԥ����Χ�������Ϊ���˶��켣�����ģ��ۺ�ǰ�����ĵ�ͼ������켣��Ϣ�����Զ���ʻ����������·�߽��й滮��ִ�м�ʻ��Ϊ��
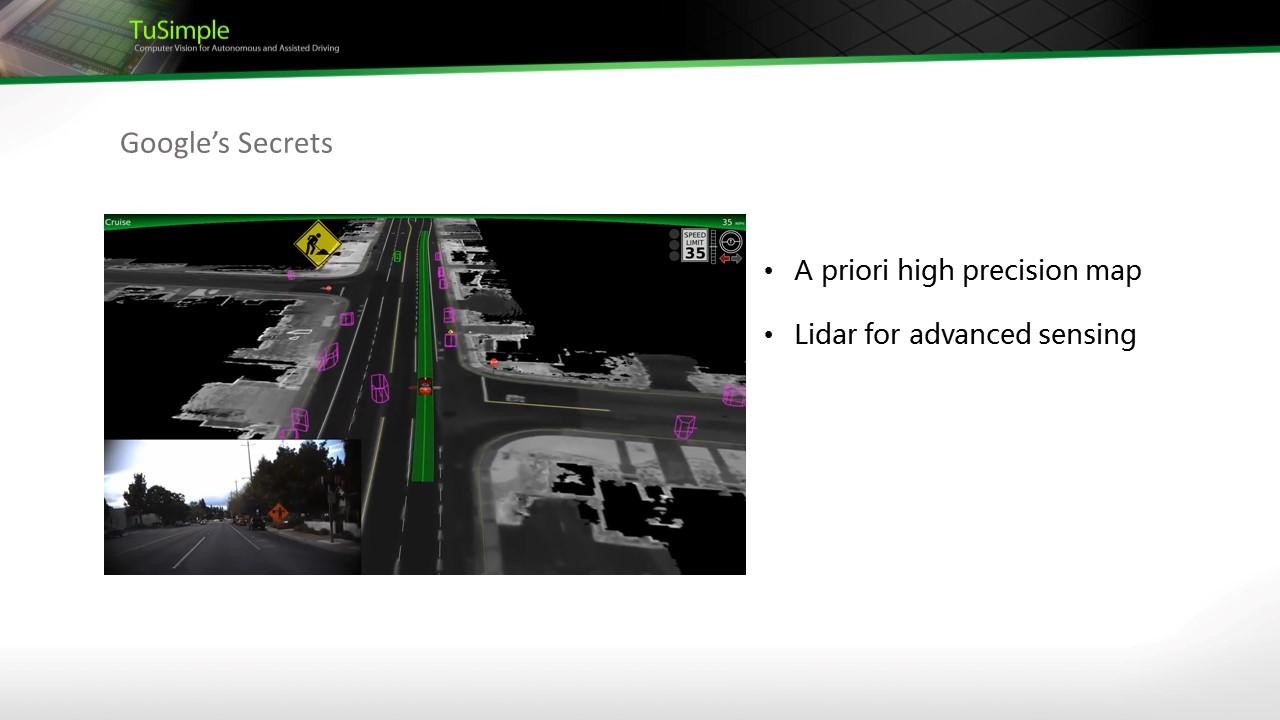
��������Google�Զ���ʻ����Ƶ�����Կ������������˺ܳ�ɫ���Զ���ʻ��Ч��������ʶ����Χ�ij��������˺ͽ�ͨ�����Խ��к����ı��ϡ���09�굽���죬Google���Զ���ʻ�����Ѿ���ʻ��200��Ӣ�һ��������ʮ�����¹ʣ���Щ�¹���ֻ��һ���¹������Զ���ʻ������ԭ����ɵġ�Ҳ����˵�����ʮ�����¹����棬ȫ��������Ϊ��������ʧ��ײ�������˳���
������������Ҳ��ӳ��һ��������˼�����顣��ҿ��ܾ����Զ���ʻ��һ����ԱȽ�Զ���߱Ƚϲ������һ������������Google�IJ�������֤���ˣ��������ʻ������ʵ���������ȫ��
��������һ��Google���Զ���ʻ����������Ϊ��Ҫ���������ס���һ��Google��һ���ù�ҵ��ķ���ȥ֤���˴��ģ�����ߵ�ͼ���ƶ��Զ���ʻ����Ҫ�ԡ��ڶ���Google��Lidar��֪�ϵļ������ۡ�
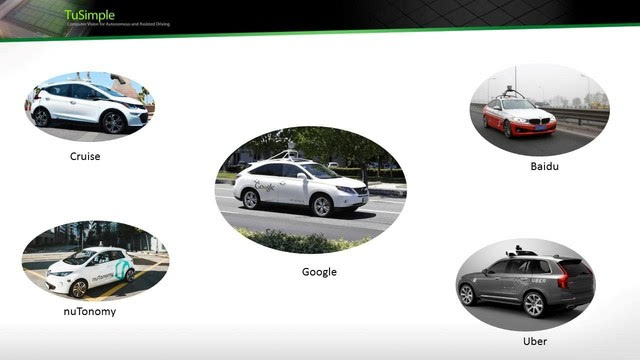
����Google�ijɹ�Ҳ�ƶ���������ҵ�ķ�չ��������ӿ�ֳ��ܶ�����Զ���ʻ�Ĺ�˾��������Cruise�������Ѿ���ͨ��������10����Ԫ�չ��ˡ���nuTonomy,�������¼��µĿ�ʼ�������˳������˾�л��аٶȺ�Uber�����Կ������еķ�������������һ���̶���ȥ����Google������˵�����˹̹����CMU��˼·��ʹ�ø߾��ĵ�ͼ���ƺ�Lidar���и�֪��
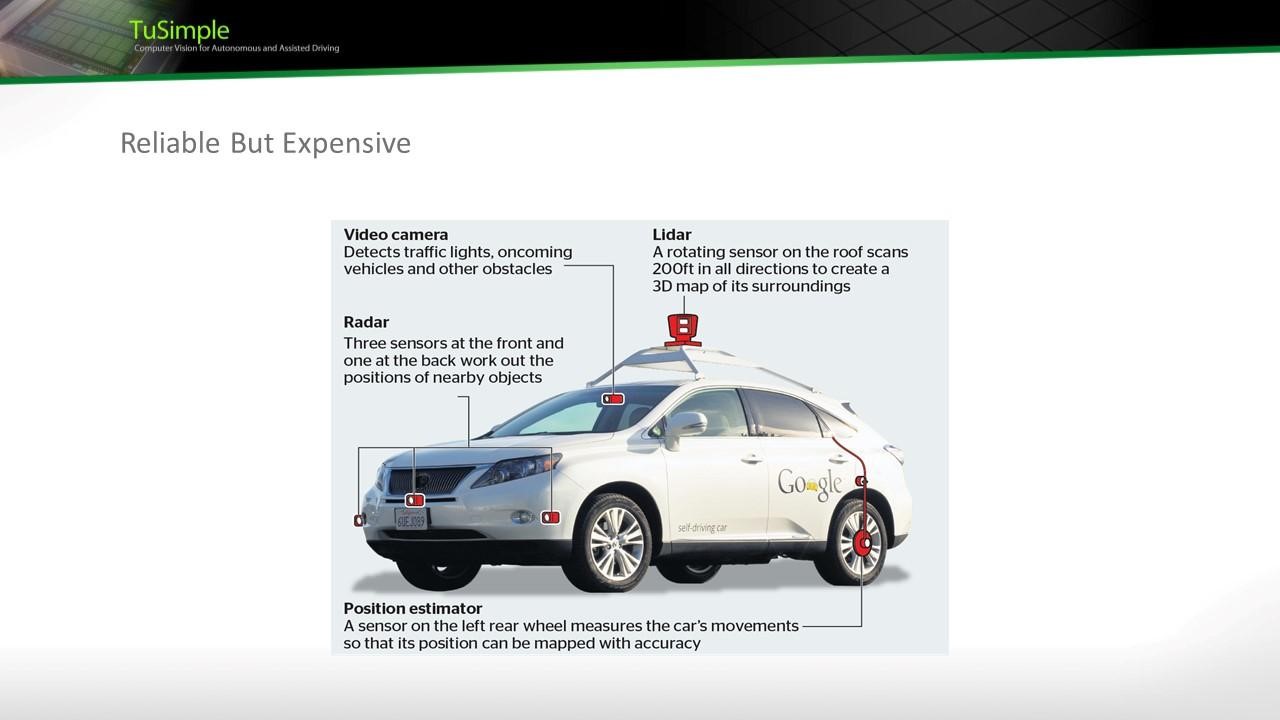
������һ��������Ҫ�����Ƿdz��Ĺ�Lidar�߾����Ե���Ԫ������������������Ӳ���ɱ�����20����Ԫ���ϣ�ԶԶ������һ����ͨ�γ��ijɱ���
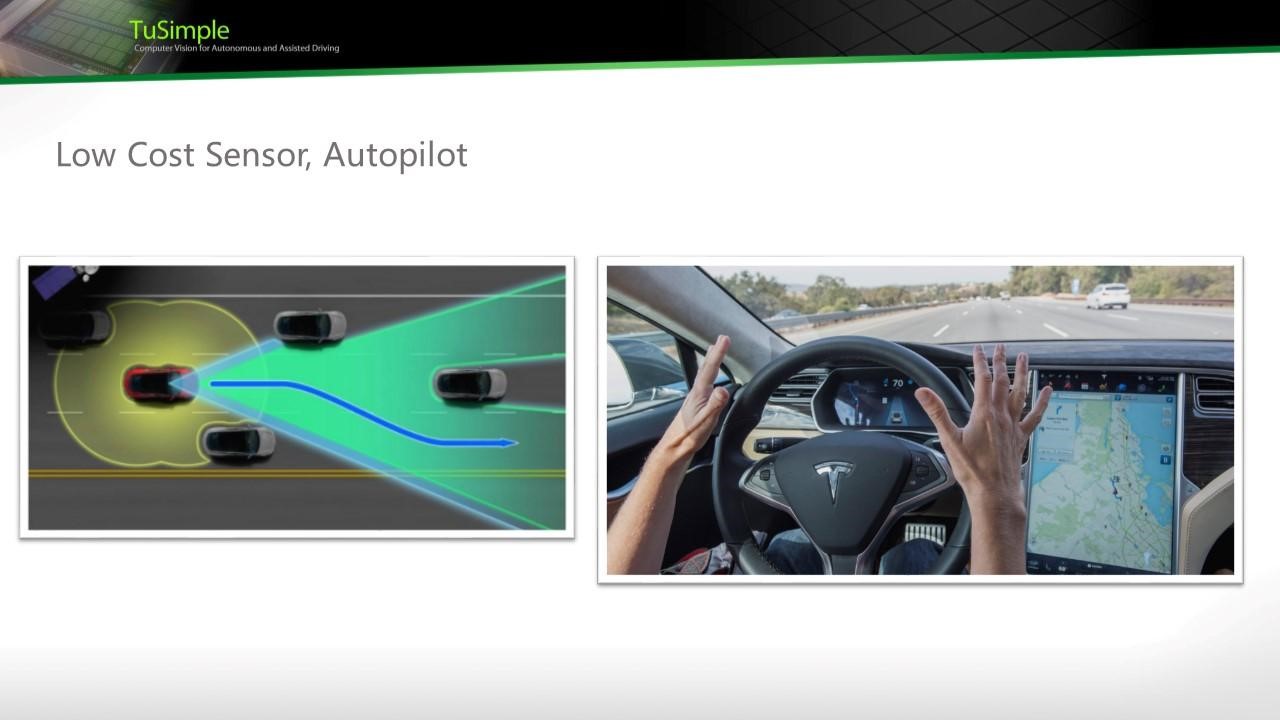
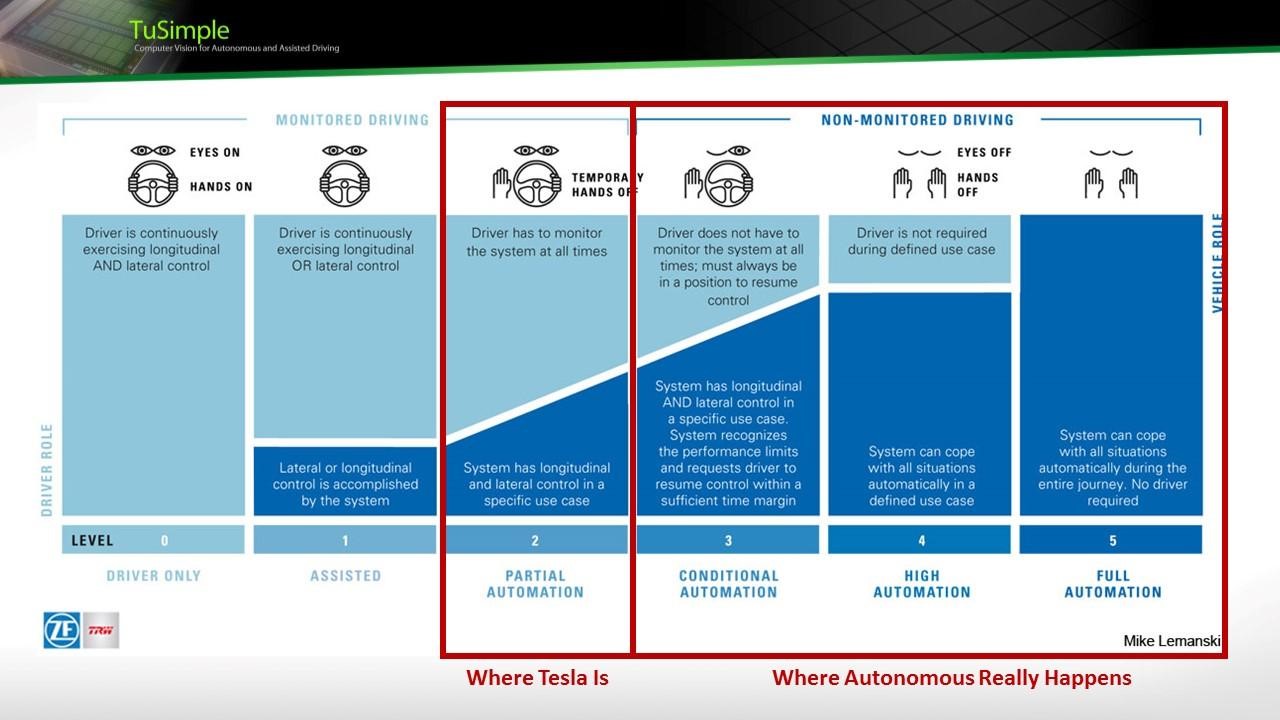
�����߳ɱ���Լ���Զ���ʻ����ҵ�����ռ��ԡ����ڽ�������Ҳ�ܿ��������Զ���ʻ����صIJ�Ʒ��Tesla��ȥ���Ƴ���autopilot��Ʒ������������һ�����ӡ���һ������ʵ�ּ���̶��ϵ��Զ�����ʻ��������Ѳ�����������֣������ڼ�ʻԱ��ָʾ�½��б������һ����ͨ���Ѿ������û��Ĵ�������оƬʵ�֣�����Ҫ���ߵ�ͼ���ƺ�Lidar��
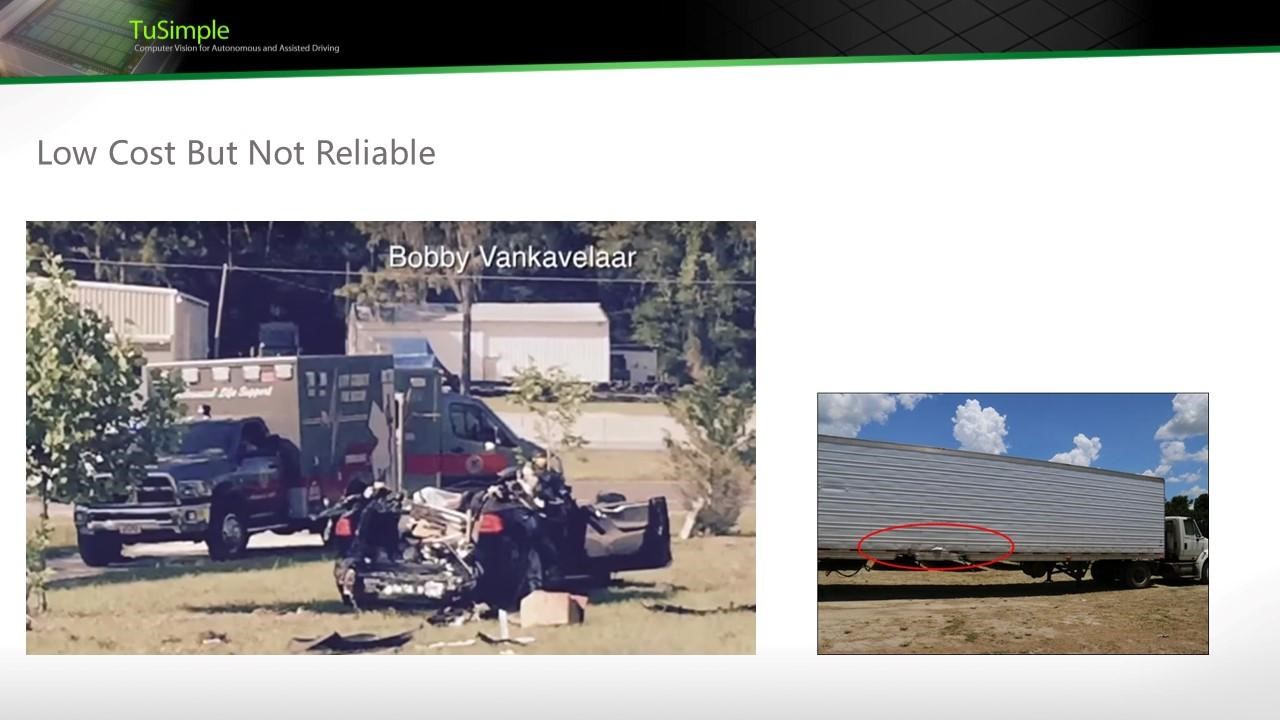
������ͬʱ����˹��Ҳ��Ϊ�¹�Ƶ����������������顣�����ϰ����Ⱥ��ڷ������ͱ������������������¹ʡ�Tesla�ļ����������MobileyeҲ��ΪTesla���Զ���ʻ�ļ���̬��ֹͣ����tesla�ĺ�������ȫ��Ϊ����Լ��һ�����ռ�������Ҫ���ء�
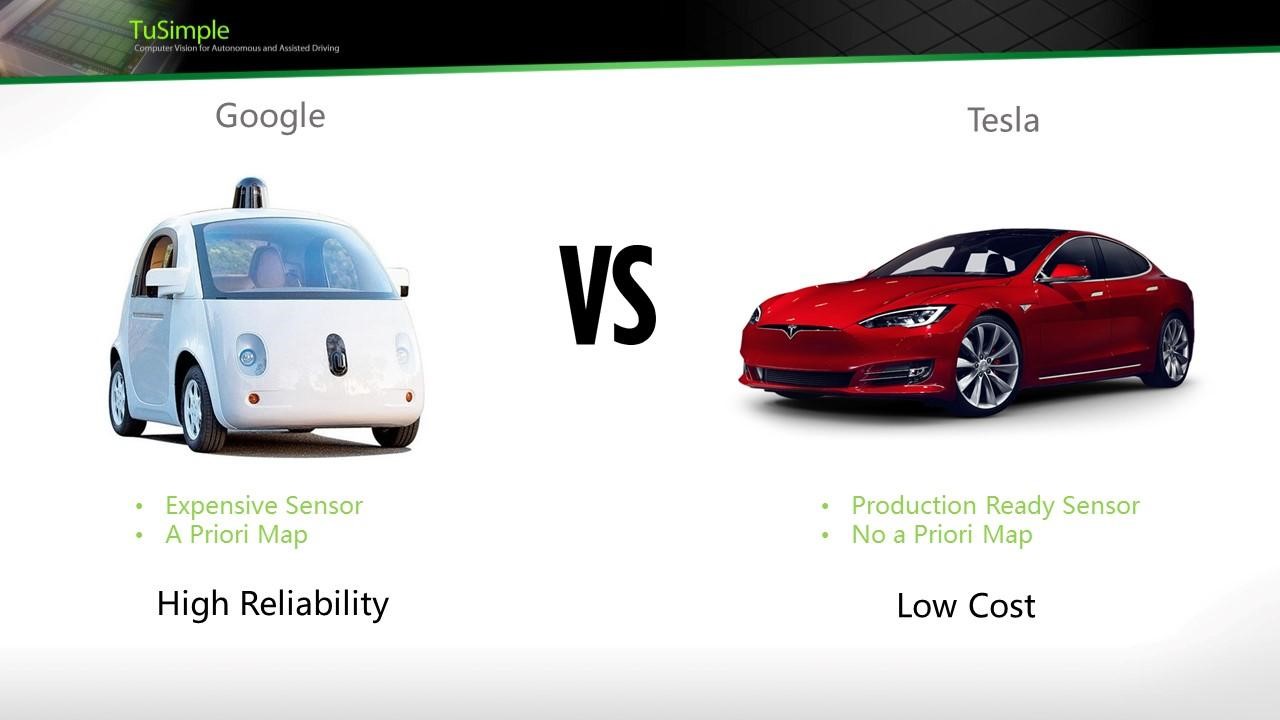
�����Ա�Google����˹���ļ�����Googleͨ����ǰ���Ƶĸ߾���ͼ���ټ��ϸ߾��ȵĴ�����ȥʵ���Զ���ʻ����һ�����ɿ����dz�������˹�������������ߵĵ�ͼ���ƣ�ֻ��һЩ�Ƚϳ����ADAS�ļ������������ͳɱ��ͳ̶ȵ��Զ���ʻ��
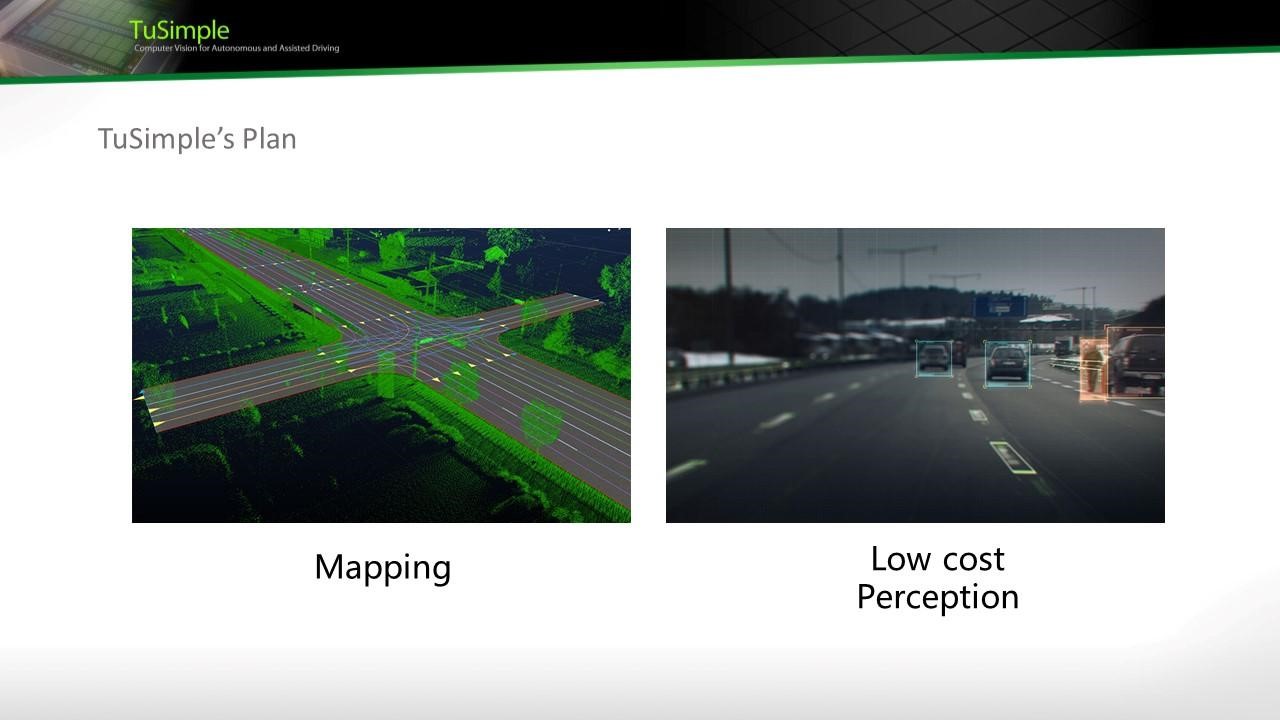
������ͼɭ��˾��Ϊ�Զ���ʻӦ��������֮���ҵ�һ��ƽ��㡣���ÿ���ҵ���Ĵ����������ʹ�ó���ĵ�ͼ���ƺ�֪��������ʵ���Զ���ʻ��
���������������һ��ͼɭ��˾�ļ����ɹ�����Ҫ����֮ǰ�ᵽ�ĵ�ͼ��֪������
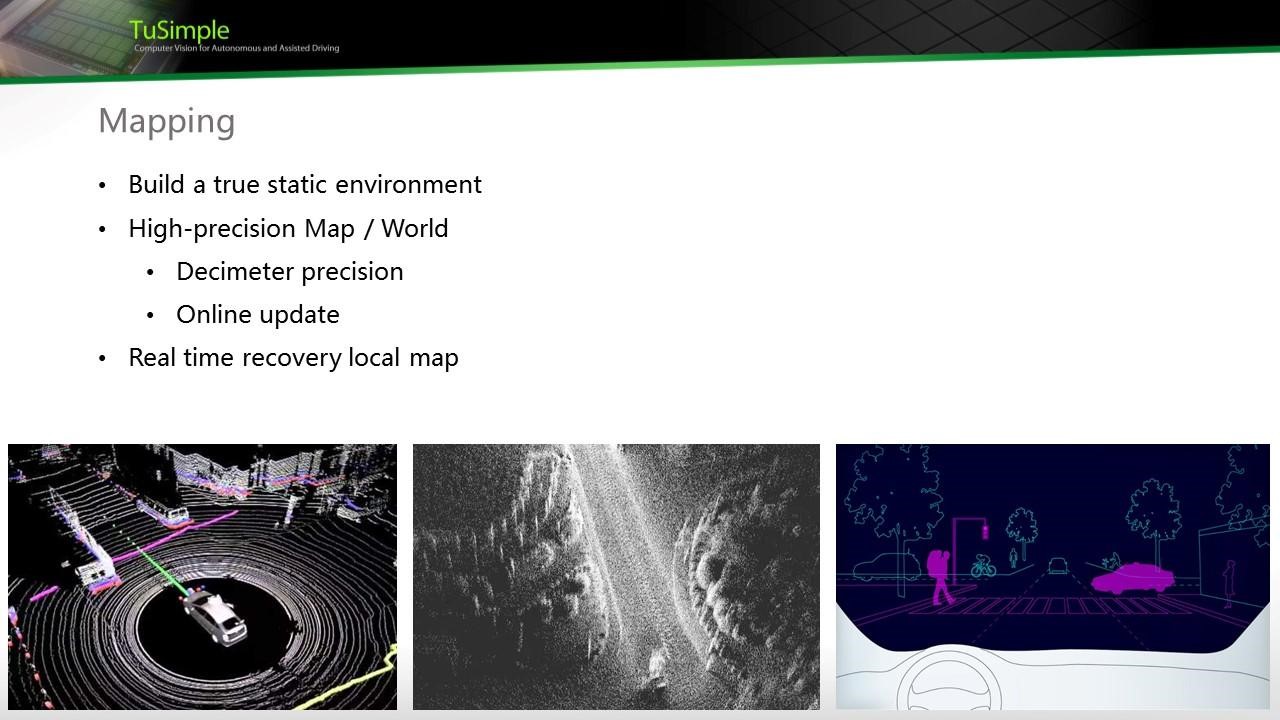
���������Ǹ߾���ͼ���ơ���һ������ҪĿ���ǻ�õ�·������3D���ƺ�ͼƬ���ݡ�ͨ����Щ����ʵ�־���ʵʱ��λ����ͼ�Ļ��������ַ�����һ��ֱ����Lidar����3D��ʵʱ���ƣ���һ�ֿ���ȥ������ͷ����2D�ĵ�ͼ���ƣ�ͨ��ͼ��ֱ��������������ת����3D�ռ䡣
������ͼ���Ƶ��ѵ�֮һ���ڸ��º�ά������Ϊ��ʵ�е�·�������������仯�������·ά�����ṹ�ĸ����Լ���Χ�����ı仯�������Ч��ά�����µ�ͼ��Ϊ�����ߵ�ͼ���ѵ㡣����ͨ��Lidar������ʼ�ĵ�ͼ���ݣ���ʹ��2Dͼ�����������˳��IJ��Ժ�������ʵʱ�ĸ��µ�ͼ��ʵ�ֿ�ά���ĸ߾���ͼ������
����ͨ����һ��ͼ��Ϣ�����Dz�������ʵʱ֪�������ڵ�ͼ�е�λ�á�������ʶ�����˳��ڲ�ͬ�ij������ܹ��ڴ�ʲô��������ոս������ĵ�ͼ�а�����¥�����ǿ���Ԥ�������¥����̨�ϻ����˳��֣�������Щ�˶����˳�������Ӱ�졣�ֻ������ǿ���ͨ���߾���ͼ֪����һ����ͨ������ά�ռ��е��ĸ�λ�ã����˳�������һλ��Ѱ�ҽ�ͨ�Ƶ��źš�
������һ�������Ǹ�֪����Ϊͼɭ��һ��������Ӿ���˾����������Ҫ���ܼ�����Ӿ���صĸ�֪ϵͳ������Ϊ���Ӿ���֪������Ҫ��������������һ�������Ӿ���ͨ��˫Ŀ����ͷ�ؽ���ʻ�����е������Ϣ�������������ļ����١�������ʻ���������⡣

���������Ӿ��Ķ�����ͨ��һ��˫Ŀ����ͷ��ȡ������ͼƬ����������Ұ���ÿһ�����������˳��ľ��롣��һ����ͨ���Ƚ�����ͼ������ͬ���ص�ʱ����������ȡ�
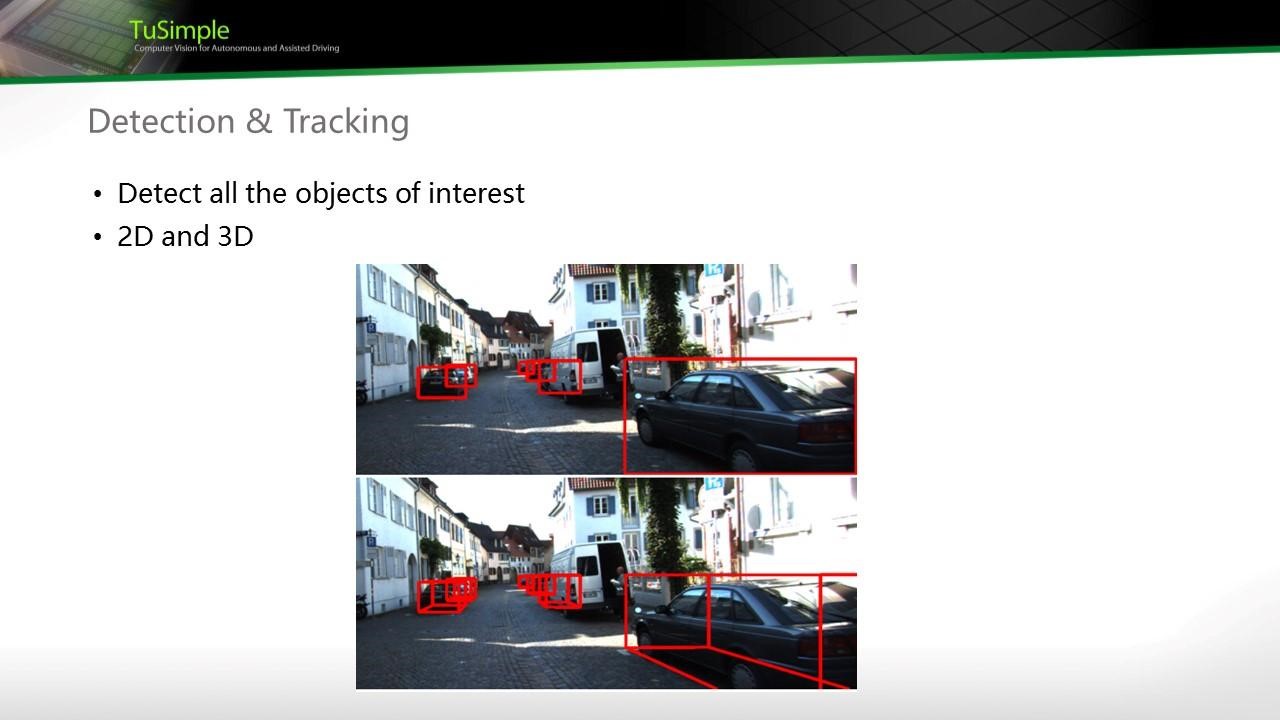
������������������ҵ���Ұ��������������λ�ã�������һ������и��١���һ�������Ҫ�ѵ�����ӵ�ӵĵ�·�������ڷdz�����ڵ���
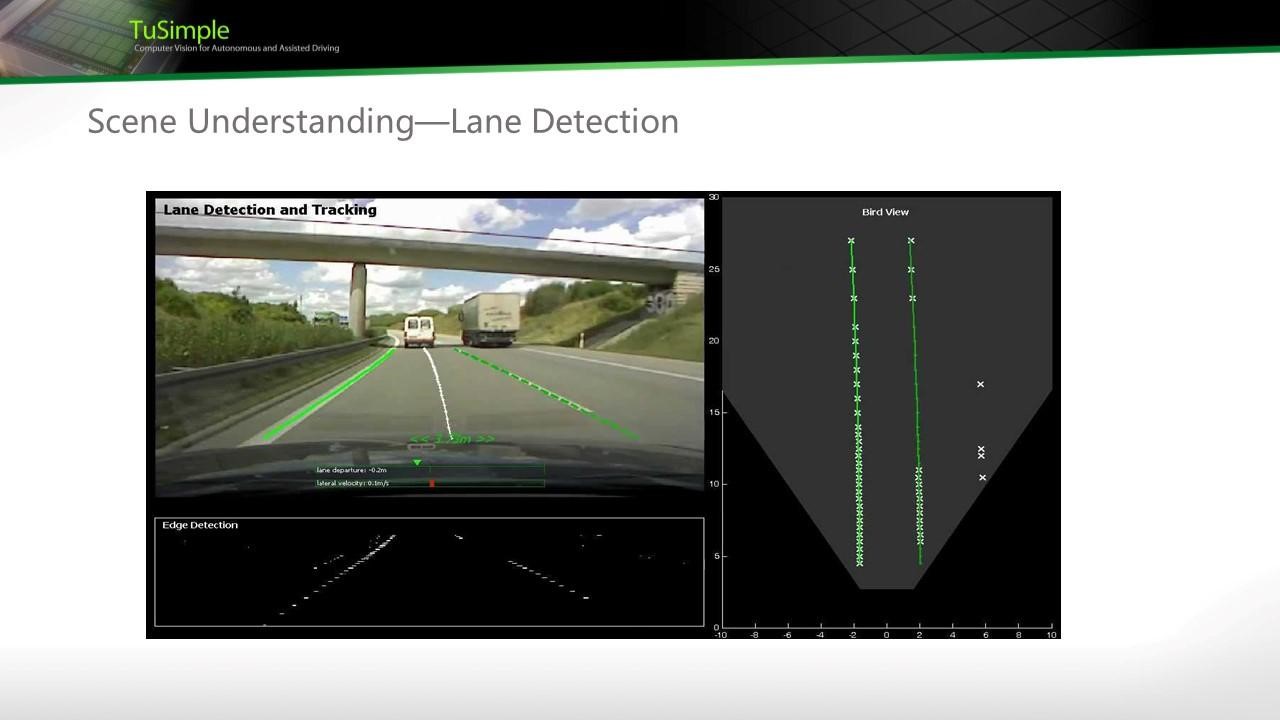
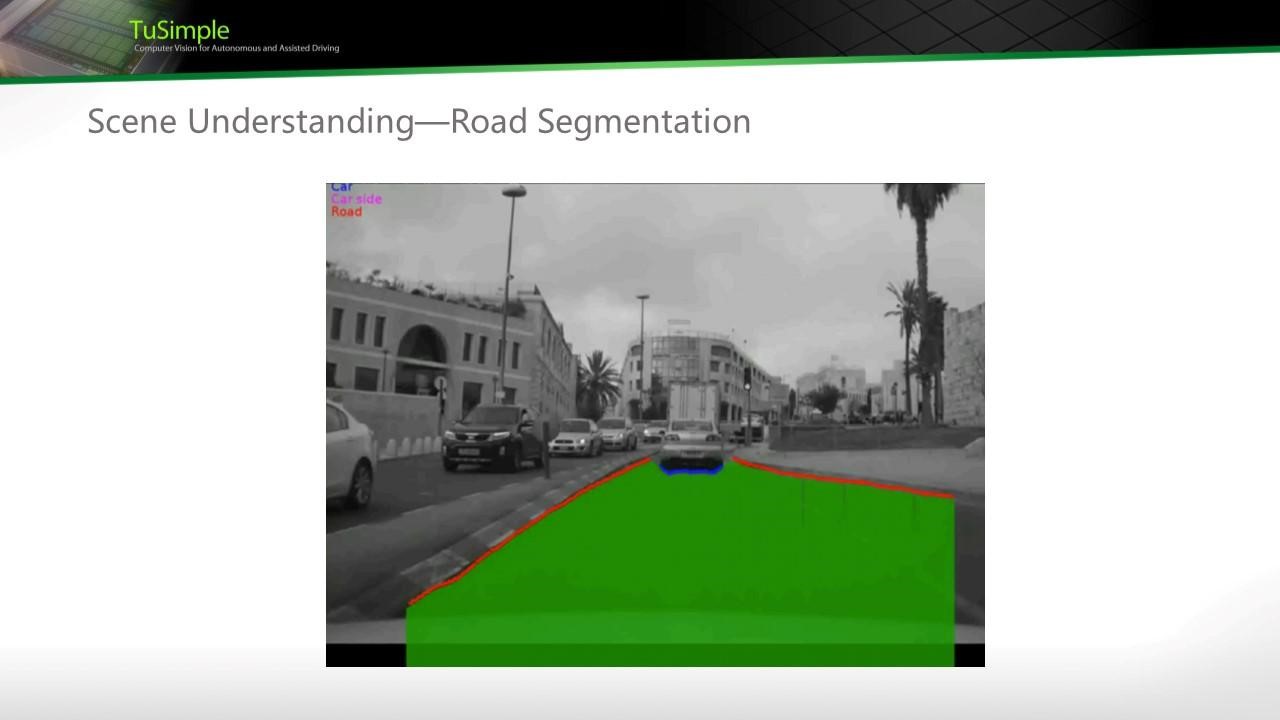

�������������Ϊ������Ρ���һ������������Լ����ڵij�����ͨ���������ʵ�֡����������һ���ܾ�Զ�ļ�����Ӿ����⣬һ��������������ܼ�������ڼ��˵Ĺ��ߺ͵�·����ȶ������Ȼʮ�����ѡ��ڶ�������������·���壬������Щ�����ǿ��Լ�ʻ�ġ��������ͨ����·�ָ���ʵ�֣�����һ�ŵ�·ͼƬ��������Ҫ������Щ�����ǿ�����ʻ�ĵ�·����������������ⳡ���е��������ء�����ͨ������ָ���������
�������������ǵ�demo��
�������ԣ�
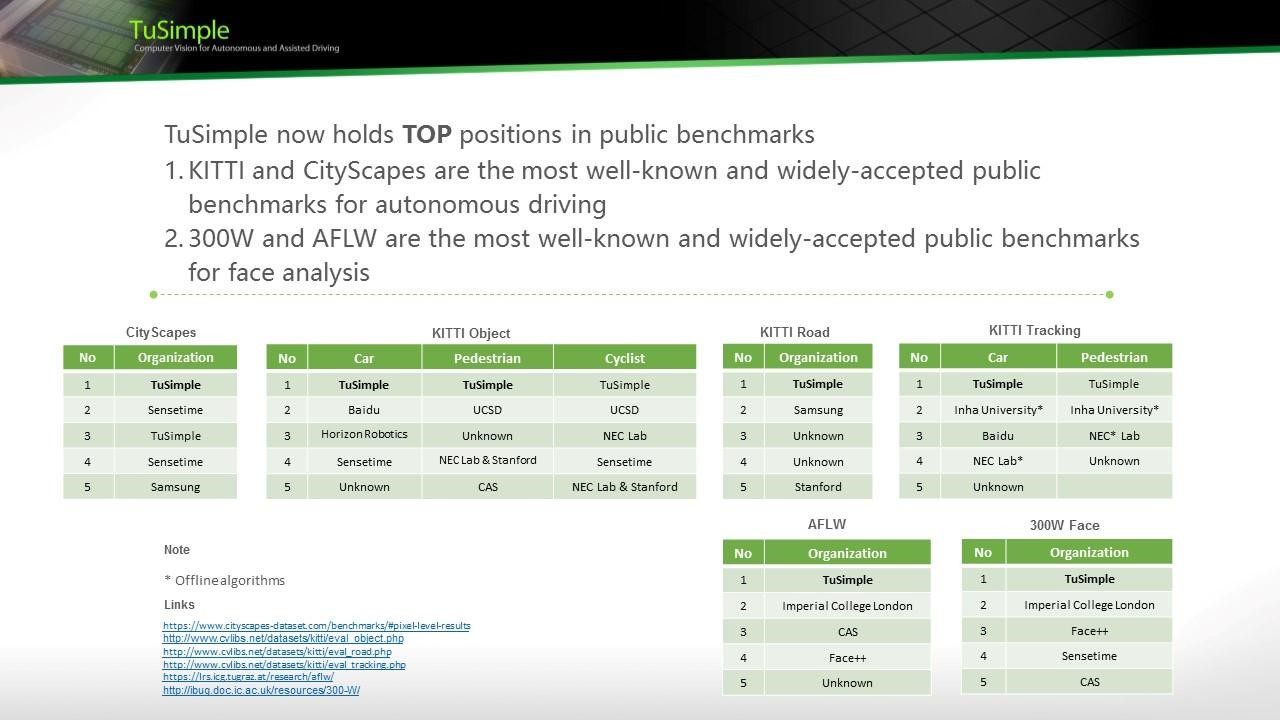
����Ϊ�˲����㷨�ijɹ���ͼɭtusimple.com�����˼�ʻ��ص����ݼ����ύ������㷨�Ľ����ͼɭ��˾�ڸ������ݼ��ж�ȡ�÷dz��õijɼ���
��������ܽ�һ�£�ͼɭwww.tusimple.comϣ��ͨ���ṩһ�ͳɱ��ġ������û��ķ���ʵ���Զ���ʻ������ͨ������;����ʵ�����Ŀ�ꡣ��һ�Լ�ʻ��·�������ߵĸ���ȵ�ͼ���ơ��ڶ���ͨ��ͼɭӵ�е����������Ƚ��ĸ�֪�㷨³���ĵͳɱ���֪��
��������������������ǵIJ�Ʒ˼·��
�����Զ���ʻ��չ�����죬��Ȼ����ȫ����Ƚ�Զ��������Ϊ����Ŀ����Զ���ʻ��Ϊ����һ���dz���ս�ķ�������Ҫ���������ѵ㡣��һ���ڶ��л����£���ʻ�ij����dz��ĸ��ӡ���һ�����й���Ϊ���ԣ��й���������ɫɫ�����ֳ���Ħ�г������ˡ����г�Ҳ���ܴ�����ط����֡��ڶ��������������Ҫ�������еĸ��ӳ�����������Ҫ�ƶ����ӵĹ滮�㷨ʵ�ֺ��˵ĺ�г��ʻ���ڶ������ģ�����ͼ���ơ����������һ���dz���������飬����ȥ����������ģ��������˵�����������ֵ���ÿ���ֵ�Ҫ��һ�����ڸ��µ�ͼһ�Σ������ijɱ���ʹ��˾Ҳ���ѽ��ܡ�����,����һ�Σ������Զ���ʻ�ijɱ�����½�����ʮ������ҳɱ������Ӷ������Ѽ����г����DZȽ����Խ��ܵġ���Щ������Լ���Զ���ʻ��ͨ�ó��������ģ���к����Ѽ����г����ռ���
���������������ڸ���ע��һ��ϸ���г����Զ���ʻ���ˡ�����г����������ơ���һ�������г����ڼ�ɢ���ġ���ļ�ɢ����֮���·�����ǹ̶��ġ��⼫��̶ȼ����Զ���ʻ�ĵ�ͼ�������ڶ�����Ҫ�Ļ��˳����������ڸ��ٺͽ��������У��������������µĽ�ͨ�����Լ�������������Ϊһ����ҵ����Ϊ����һ�г��Խϸ߳ɱ�����������Ч�ʵ��Զ���ʻϵͳ����������ǿ��
�����й��зdz���Ļ����г����й�����ǧ������������ǧ���˾������Щ������˾�������й�76%�Ļ���������ͬʱ����Ҳ��һ���dz�Σ�յ���ҵ����32%���¹ʻ�ֱ�ӵ��������������������ռ��������ͨ������88%��ͬʱ���ڻ����г��������Ȼ��Ľ��죬���˹�˾�������ʷdz��ĵ͡��Զ���ʻ��������ȥ������Щ��˾��ʡһ���������ɱ������Լ���̶���������ǵ������ʡ�

�����ҵ���˵�͵�������������ǵĹ��ںţ����������ڽ��д��ģ����Ƹ�����Ƿdz���Ҫ�˹����ܣ����ѧϰ���Զ���ʻ�ʹ����ݷ��������˲š���Ҷ����ǹ�˾����Ȥ�Ŀ��Ը����Ƿ��ʼ������ǿ�������������Զ���ʻ��лл��ң�
���������˼�飺�����������ڻ�÷¡��ѧ������ѧ˶ʿ���������պ����ѧ���ơ��о����ڼ�����з���ʻԱ���ϵͳ��������������ͨ��������Ʒ����ѧ�ڼ����з��ɴ�������ʶ����������������ڵ���ͼɭ�����������������ѧϰ�ŶӸ����ˡ�






























����˵�������а�